
人工智能发展纪元:技术突破、产业重构与人才培养的新格局
当前,全球人工智能(AI)领域正经历一场深刻的变革,从底层模型架构的创新到上层应用场景的拓展,再到整个产业生态的战略调整,无不预示着AI技术正加速渗透并重塑我们的世界。本文将基于近期一系列重要事件,深入剖析AI在技术前沿、应用落地、商业模式以及社会影响等方面的最新态势。
突破性模型:声音与智能的效率飞跃
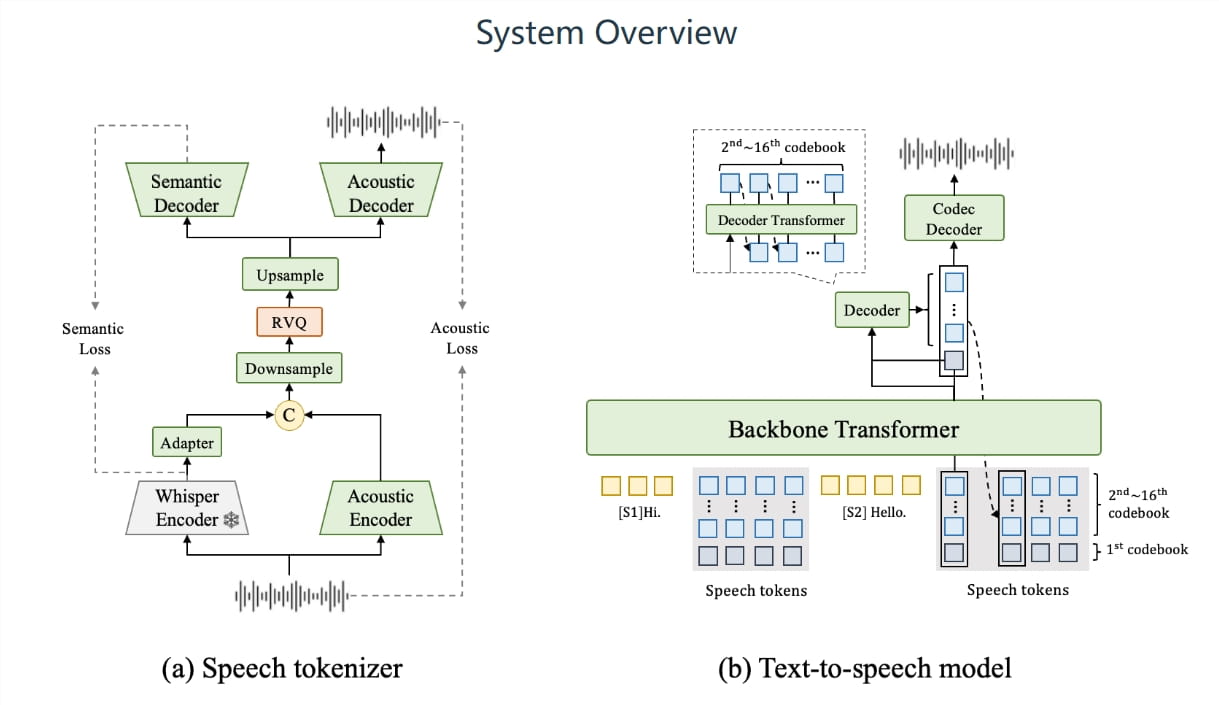
在AI模型研发方面,多项创新成果正显著提升人工智能的处理能力与应用潜力。小红书智创音频技术团队近期发布的新一代对话合成模型FireRedTTS-2,代表了语音合成技术的一大进步。该模型不仅在合成效果和自然度上取得显著提升,更具备独特的音色克隆能力,仅需少量样本即可生成逼真的多说话人对话。其对多种语言和低帧率离散语音编码器的支持,进一步保证了合成速度和稳定性,使其在AI播客制作、虚拟助手等多个场景展现出广阔的应用前景。FireRedTTS-2的出现,标志着对话式AI在交互体验上向更高自然度迈进,为数字内容创作注入了新的活力。
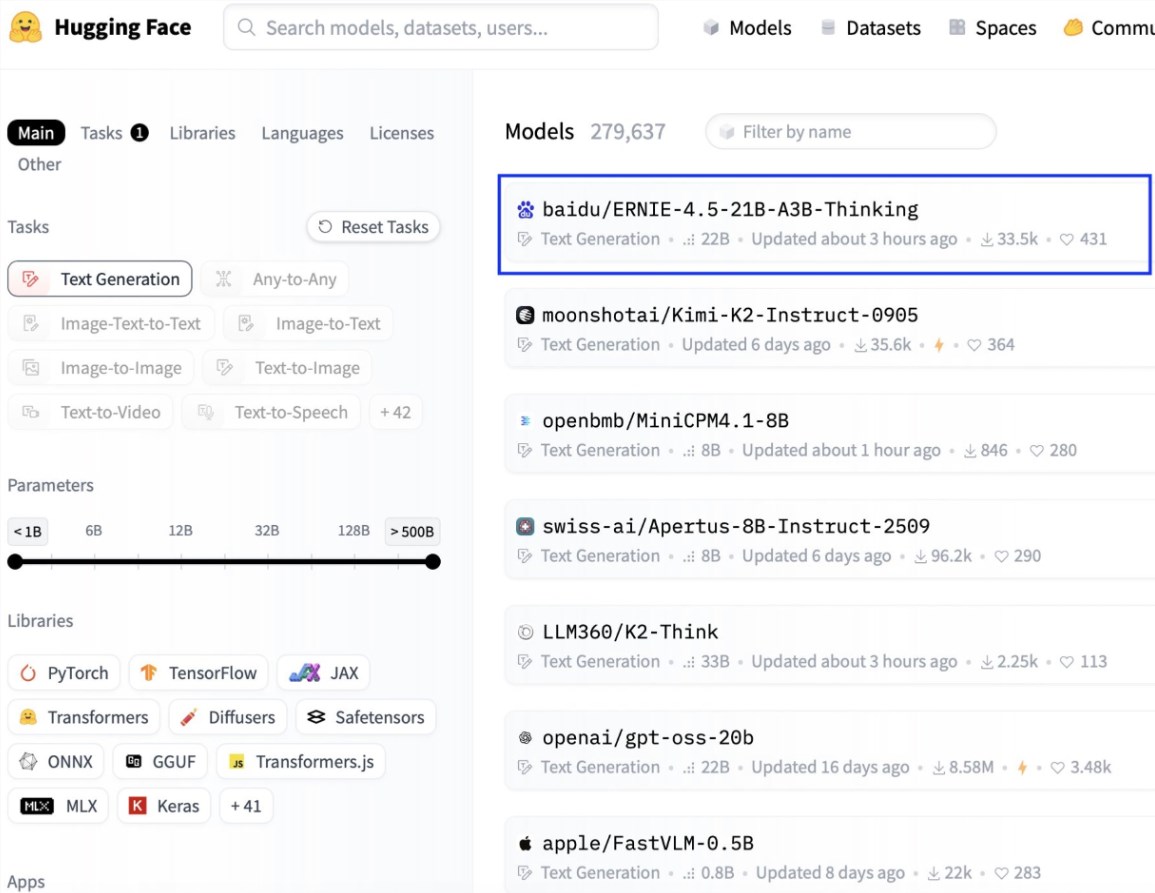
与此同时,百度文心大模型家族也推出了其全新开源模型ERNIE-4.5-21B-A3B-Thinking,并在Hugging Face平台迅速登顶文本生成模型榜单首位。这一成就的背后,是其高效的推理能力和参数效率的支撑。该模型创新性地采用了Mixture-of-Experts(MoE)架构,总参数量达到21B,但每个token仅激活3B参数,极大地降低了计算开销,提升了运算效率。同时,ERNIE-4.5-21B-A3B-Thinking支持128K长上下文窗口,使其在处理逻辑推理、数学求解和学术分析等复杂任务时游刃有余。基于飞桨框架的训练,不仅提升了其在多模态任务上的兼容性,也确保了高效的硬件适配,彰显了中国在AI基础模型研发领域的深厚实力和自主创新能力。
这些模型技术的突破,正在共同推动AI从感知智能向认知智能、从单一任务处理向复杂任务协同的演进,为各行各业的智能化升级奠定了坚实基础。
应用场景深化:AI从实验室走向普罗大众
随着大模型能力的不断增强,生成式AI的应用已不再局限于科研机构或大型企业,而是日益深入到普通用户的日常生活中。谷歌推出的Gemini应用在美国App Store免费应用榜单中的迅速登顶,便是一个强有力的例证。作为iPhone用户的新宠,Gemini的核心功能,尤其是其Nano Banana图像编辑模型,因其在保持人物特征一致性方面的出色表现而广受好评。Gemini的成功不仅反映了生成式AI技术在移动端的广泛应用潜力,也预示着用户对智能、便捷的AI辅助工具的需求正日益增长。
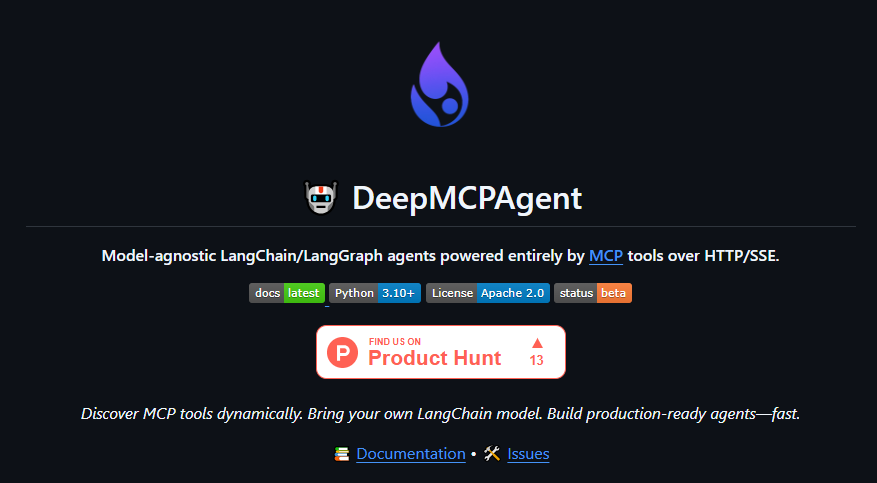
在开发者生态方面,开源框架DeepMCPAgent的问世,则进一步降低了AI代理(AI Agent)的开发门槛,加速了AI技术从原型到生产的转化。DeepMCPAgent提供动态MCP(Multi-modal Collaborative Planning)工具发现功能,支持开发者基于LangChain和LangGraph等主流框架快速构建生产级MCP驱动代理。它与多种主流大型语言模型(LLM)的无缝集成,显著提升了AI代理的灵活性和可扩展性,使得构建具备复杂任务处理能力的智能代理成为可能。这对于促进AI应用创新,推动行业智能化转型具有重要意义。
这些案例共同表明,AI技术正加速从前沿研究走向实际应用,并以更加普惠和易用的形式触达更广泛的用户群体和开发者,开启了AI赋能千行百业的新篇章。
产业生态重构:战略调整与价值再分配
AI产业的快速发展也伴随着深刻的战略调整和价值链的重新分配。埃隆·马斯克旗下的xAI公司宣布将进行战略转型,从通用AI导师转向专业AI导师,并计划裁员500人,主要涉及数据标注团队。此举反映了AI公司在面对市场竞争和技术演进时,选择更加聚焦细分领域,通过深化专业化优势来提升核心竞争力。同时,xAI计划大幅扩张专业AI导师团队,预示着未来AI服务将更加注重深度定制和垂直领域的应用。
在顶级AI公司与科技巨头的合作关系上,OpenAI与微软的财务协议调整也引起了广泛关注。OpenAI计划将其与微软的收入分成比例从当前略低于20%逐步降至2030年的8%,此举预计将为OpenAI带来超过500亿美元的额外收入,用于AI模型训练和扩展。作为回报,微软将获得新协议下OpenAI实体三分之一的股份,但不会在董事会中占有席位。这一调整不仅是双方在成本分摊和利益分配上的战略博弈,也体现了AI研发高昂的计算开销,以及头部AI公司对资金自主权和发展灵活性的诉求。
此外,蚂蚁集团发布的人工智能开源生态全景图2.0版本,则系统性地展示了当前AI开源项目的最新动态和发展趋势。通过OpenRank评价体系筛选出的114个最具价值项目,涵盖了22个技术细分领域,并揭示了全球开发者在AI技术领域的分布格局。该全景图不仅是行业发展的风向标,也体现了开源协同在AI创新中的关键作用。这些产业层面的重大调整,共同塑造着未来AI市场竞争的格局和生态协作的模式。
人工智能素养:面向未来的教育布局
随着人工智能技术的普及,提升全民的AI素养已成为全球共识。北京市教育部门在新学期全面推出人工智能通识课程,覆盖小学至高中各个学段,正是这一趋势的生动体现。此项课程旨在培养学生的AI意识、应用能力与伦理责任,通过项目实践的方式帮助学生锻炼创新思维和解决问题的能力。目前,北京已有1400多所中小学开设了人工智能通识课程,且每学年不少于8课时。课程内容设计注重一体化,可独立设置也可与其他科目融合,以避免重复交叉。
北京的这一教育举措,不仅体现了对未来人才培养的前瞻性思考,也为其他地区提供了可借鉴的范本。它强调了在AI时代,教育不仅仅是传授知识,更是培养批判性思维、创新能力和伦理意识的关键。通过在基础教育阶段普及AI通识,将为社会培养更多具备AI思维和应用能力的公民,从而更好地应对人工智能带来的机遇与挑战。
展望:融合与发展的AI新范式
综观近期AI领域的诸多进展,我们可以清晰地看到人工智能技术正沿着多条路径并行发展:从基础模型效率的持续提升,到特定应用场景的深度拓展;从企业战略的精细化调整,到教育体系的前瞻性布局。这些发展共同指向一个更加智能、更加融合的未来。随着技术的日益成熟和产业生态的不断完善,人工智能将不仅仅是一种工具,更将成为推动社会进步、经济发展和人类文明演进的核心驱动力。未来的AI发展将更加注重技术创新与伦理治理的协同,在追求效率和智能化的同时,确保AI的负责任和可持续发展。

