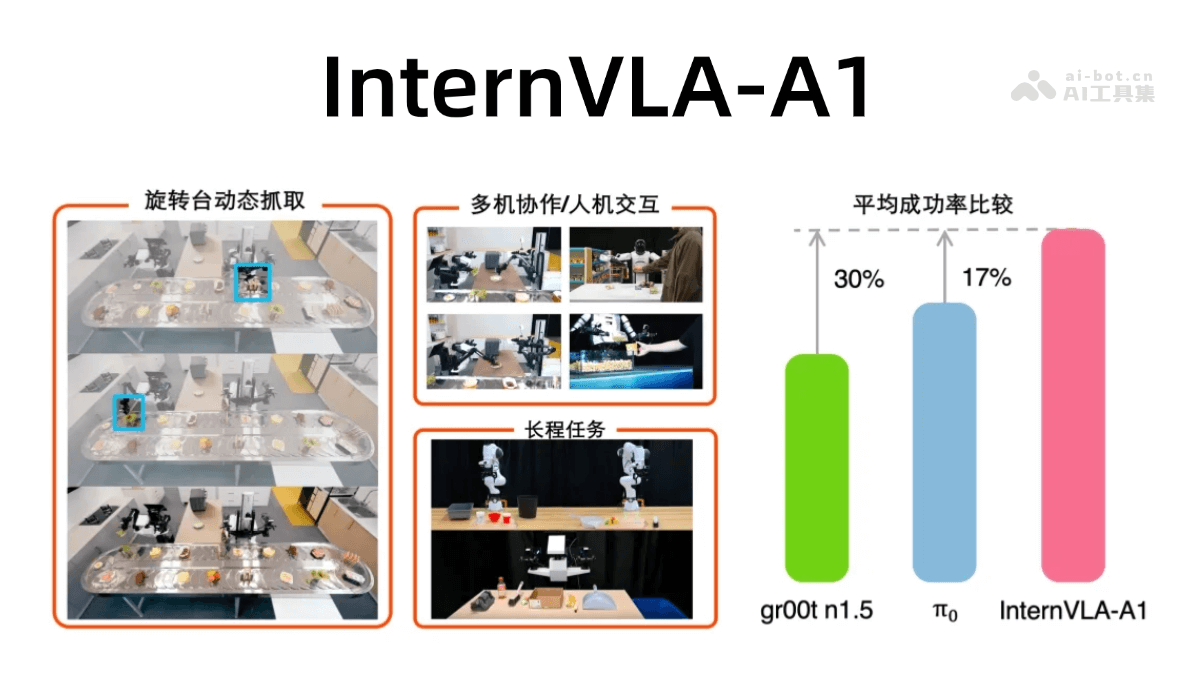
具身智能新里程碑:InternVLA-A1的深度解析
具身智能,作为人工智能领域的前沿方向,旨在赋予机器人在物理世界中感知、理解、推理并执行复杂任务的能力。在此背景下,上海人工智能实验室联合国家地方共建人形机器人创新中心,重磅发布了其具身操作大模型InternVLA-A1,标志着这一领域迈出了坚实而关键的一步。InternVLA-A1不仅仅是一个技术集成,更是一个拥有理解、想象和执行一体化能力的智能体,它为机器人更自然、更精准地融入人类生活与工作环境提供了全新的可能性。这款模型的核心在于其通过大规模虚实混合场景数据的融合与自动化构建,积累了高达600万条多模态语料,这在很大程度上解决了具身智能数据稀缺和泛化能力不足的挑战。更值得关注的是其“一脑多形”的设计理念,使得同一套智能系统能够驱动多种形态的机器人本体,从而在不同场景和硬件平台上实现零样本泛化,极大地拓展了具身智能的应用边界。
InternVLA-A1的核心功能与创新之处
InternVLA-A1的设计目标是让机器人能够像人类一样,在复杂多变的环境中完成精细且智能的操作。其主要功能涵盖了从认知到执行的完整链条,并在多个维度展现出创新性。
1. 理解与想象:深度任务规划
传统机器人往往依赖预设程序,而InternVLA-A1则通过其强大的认知模块,能够深度理解环境上下文与任务需求。这不仅仅是识别物体或遵循指令,更是基于对物理世界内在规律的认知,通过“想象”来规划出最优的操作路径与步骤。例如,当面对一个需要组装的复杂零件,模型能预判不同操作序列可能导致的结果,从而选择最有效率且成功率最高的方法。这种能力为机器人应对非结构化、高复杂度的现实任务提供了核心驱动力。
2. 精准执行:微操与适应性
在完成理解与规划后,InternVLA-A1展现出卓越的精准执行能力。它能够对机器人末端执行器进行高精度控制,无论是抓取微小物体的轻柔之力,还是搬运重物的稳定策略,都能确保任务的准确无误。更重要的是,模型在执行过程中具备实时调整能力,能够应对传感器误差、物体滑动或环境扰动等不确定性,确保动作的鲁棒性和成功率。
3. 虚实融合:数据驱动的泛化能力
模型的强大性能离不开其大规模的虚实融合数据策略。InternVLA-A1综合运用了真实世界中采集的操作数据与虚拟仿真环境中生成的数据。仿真数据可以提供海量的、多样化的、带有精确标注的场景,有效弥补真实数据获取成本高、效率低的缺点。而真实数据则能够校准仿真与现实之间的“领域鸿沟”。这种深度融合不仅扩充了训练数据集的规模,更重要的是提升了模型从模拟环境到真实世界的泛化能力,使其在未知场景中也能表现出色。
4. 多机协作:协同效率的最大化
在面对需要多个机器人协同完成的大型或复杂任务时,InternVLA-A1支持多台机器人之间的智能协作。它能够根据全局任务目标,合理分配子任务给不同的机器人,并协调它们的行动以避免冲突,优化整体流程。这种能力在智能工厂、大型仓储物流等场景中具有巨大的应用潜力,能够显著提升作业效率与灵活性。
5. 跨平台适配:“一脑多形”的普适性
“一脑多形”是InternVLA-A1最显著的特点之一,它意味着同一套智能决策系统能够适配并控制多种不同形态的机器人本体,包括方舟无限、国地青龙人形机器人、智元Genie等。这种通用性通过模块化设计和抽象化的接口实现,极大地降低了机器人系统的开发和部署成本,并加速了具身智能技术的普及与应用。
6. 动态交互:复杂环境中的应变力
现实世界充满动态变化,InternVLA-A1在高动态场景下的表现尤为突出。它能够实时感知环境变化,如移动的障碍物、突然出现的指令或变化中的目标,并迅速做出反应和调整。这种强大的动态适应能力和稳定的交互性能,是机器人从实验室走向真实复杂应用场景的关键所在。
InternVLA-A1背后的技术原理
InternVLA-A1的卓越性能并非偶然,而是基于一系列先进的AI技术深度融合与创新应用。
1. 多模态数据融合架构
模型采用了先进的多模态数据融合架构,能够整合来自视觉(摄像头)、本体感受(关节角度、力矩)、触觉传感器以及自然语言指令等多种模态信息。通过深度学习网络,这些异构数据被编码并融合为统一的语义表征,使得模型能够对环境和任务形成更全面、更丰富的理解,从而做出更精准的决策。
2. 虚实混合训练范式
为解决数据规模和多样性问题,InternVLA-A1采用了独特的虚实混合训练范式。在虚拟环境中,通过高度仿真的物理引擎生成海量训练数据,涵盖各种极端情况和难以在现实中复现的场景。同时,利用领域随机化(domain randomization)等技术,使模型学会从不同仿真环境中泛化。随后,结合真实的机器人操作数据进行微调和校准,有效弥合了“模拟到现实”的鸿沟,显著提升了模型的泛化能力和鲁棒性。
3. 自监督学习的引入
自监督学习在InternVLA-A1中扮演了重要角色,它允许模型在缺乏显式人工标注的情况下,从海量的无标注数据中学习有用的特征和知识。例如,通过预测机器人自身的未来状态、补全遮挡的视觉信息或从连续动作中学习时序关系,模型能够自主地提取出对具身操作至关重要的低维、高语义表征,从而提高数据利用效率并增强模型的自主学习能力。
4. 强化学习优化策略
为了使机器人能够通过试错不断学习和优化其操作策略,InternVLA-A1集成了强化学习算法。通过与环境的持续交互,机器人根据任务完成情况获得奖励或惩罚信号,进而调整其决策策略,使其在复杂任务中能够自主探索并发现更优的执行方式。这种迭代优化的过程,使得模型在实际操作中具备了持续学习和改进的能力。
5. 跨模态理解与生成
InternVLA-A1实现了从高层次语言指令到低层次机器人动作的跨模态理解与生成。这意味着用户可以通过自然语言向机器人发出指令,模型能够将其解析为具体的操作目标,并生成一系列精细的机器人动作序列来完成。反之,机器人也能通过其多模态感知能力,将其对环境的理解以结构化或语言化的形式反馈给用户,构建起更直观的人机交互。
6. 动态适应与实时交互机制
为了确保机器人在真实动态环境中的稳定表现,InternVLA-A1构建了先进的动态适应与实时交互机制。该机制允许模型以高频率处理实时感知数据,快速识别环境变化(如物体的移动、地形的变化),并基于预测模型及时调整行动策略。结合力觉反馈和视觉伺服等技术,机器人能够实现与环境的稳定、连续交互,尤其在高动态和高不确定性场景下展现出优异的性能。
InternVLA-A1的广泛应用前景
InternVLA-A1的发布不仅是技术上的突破,更预示着具身智能在多个行业领域将迎来深远的应用变革。
家庭服务: 机器人能够协助完成日常家务,如整理物品、烹饪辅助、清洁打扫、照顾老人儿童,极大地提升家庭生活的便利性和舒适度,让智能家居的愿景成为现实。
工业制造: 在智能工厂中,InternVLA-A1驱动的机器人可用于高精度零部件的装配、复杂物料的灵活搬运、以及基于视觉和触觉的质量检测等,提升生产线的自动化水平和产品一致性,实现柔性制造。
物流仓储: 在自动化仓库中,机器人可以高效地执行货物分拣、堆叠、码放和动态路径规划等任务,显著优化物流流程,降低运营成本,提高仓储效率。
医疗护理: 具身智能机器人能够辅助医护人员进行患者护理,如病患转运、康复训练指导、医疗器械递送甚至辅助手术操作,从而减轻医护人员的工作负担,提升医疗服务质量。
公共服务: 在机场、车站、商场等公共场所,机器人可提供智能信息咨询、路径引导、安防巡逻以及环境清洁维护等服务,提升公共空间的智能化水平和用户体验。
教育科研: 作为先进的科研平台,InternVLA-A1能够帮助研究人员进行复杂的实验操作、数据采集和模型验证。在教育领域,它可作为互动式教学助手,辅助编程和机器人课程,激发学生对科学技术的兴趣。
InternVLA-A1的开源策略无疑将加速全球具身智能生态的成长与发展。随着更多研究者和开发者参与到这一平台中来,我们有理由相信,具身智能将以更快的速度、更广泛的维度,赋能现实世界的各个角落,引领我们迈向一个更加智能、高效且人性化的未来。