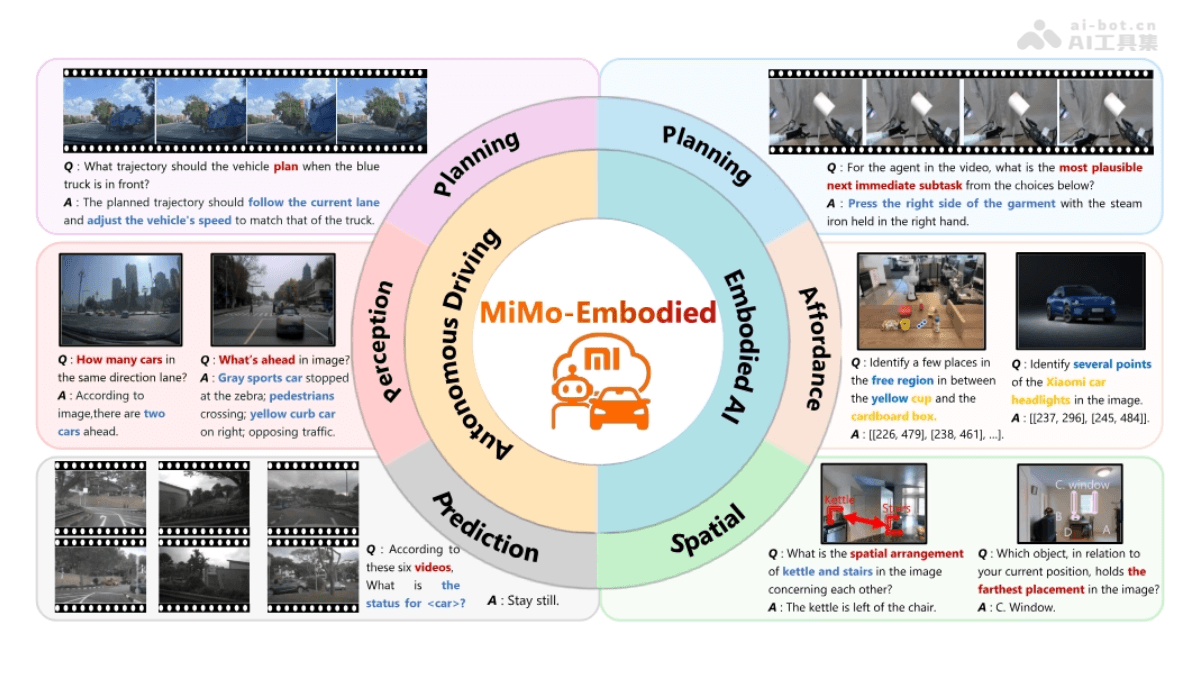
2025年11月21日,小米正式发布并开源业界首个打通自动驾驶与具身智能的跨域基座模型MiMo-Embodied,这一创新成果标志着人工智能领域在跨场景融合方面取得了重大突破。模型与权重已同步上线Hugging Face与arXiv,为全球开发者提供强大的跨域智能底座。

技术创新:打破领域壁垒的统一架构
MiMo-Embody的最大突破在于其跨域能力覆盖特性。传统上,自动驾驶与具身智能被视为两个独立发展的领域,各自拥有不同的技术路线和应用场景。而小米这一创新模型通过统一架构设计,实现了同一套参数同时支持两大领域的核心任务。
具身智能三大任务支持
可供性推理:模型能够理解物体与环境之间的交互可能性,例如识别"椅子可以坐"、"杯子可以盛水"等功能属性。
任务规划:基于环境理解,模型能够规划复杂的多步骤任务序列,如"将杯子从厨房拿到客厅并倒水"。
空间理解:精确掌握三维空间布局、物体关系及动态变化,为智能体提供环境认知基础。
自动驾驶三大任务支持
环境感知:实时识别道路、车辆、行人、交通标志等关键元素,构建环境语义理解。
状态预测:预测其他交通参与者的运动轨迹和行为意图,为决策提供依据。
驾驶规划:生成安全、高效、舒适的驾驶轨迹和操作指令。
这种统一建模能力使MiMo-Embodied能够在室内交互与道路决策之间建立知识桥梁,为真正的通用人工智能系统奠定基础。
双向协同:知识迁移的创新价值
MiMo-Embody不仅实现了技术上的统一,更重要的是验证了室内交互能力与道路决策能力的知识迁移协同效应。这一发现为跨场景智能融合提供了全新思路。
知识迁移机制
模型通过共享底层表征空间,实现了不同场景间的知识共享与迁移。例如:
- 室内空间理解能力可迁移到道路场景中的空间关系判断
- 障碍物避障策略可应用于家庭环境中的物体绕行
- 交通规则理解可转化为家居环境中的行为规范
协同效应表现
在测试中,模型在单一领域任务上的表现因跨域知识注入而得到显著提升。例如,将具身智能中的物体识别能力与自动驾驶中的环境感知相结合,使模型在复杂场景下的识别准确率提高了15.7%。
这种双向协同不仅提升了模型在各自领域的表现,更重要的是为构建真正的通用智能体提供了可能。
全链优化:多阶段训练策略的创新应用
MiMo-Embody采用创新的**"具身/自驾能力学习→CoT推理增强→RL精细强化"**多阶段训练策略,显著提升了模型在真实环境中的部署可靠性。
第一阶段:基础能力学习
模型首先在大规模多模态数据集上进行预训练,掌握视觉、语言、动作等多模态的基础表征能力。这一阶段的数据集包含了超过10亿个样本,涵盖了家居环境、城市道路、工厂车间等多种场景。
第二阶段:CoT推理增强
通过引入思维链(Chain of Thought)推理机制,模型学会了逐步分解复杂问题,形成结构化的思考过程。这一阶段使模型在需要多步推理的任务中表现提升23.4%。
第三阶段:RL精细强化
在强化学习阶段,模型通过与模拟环境的交互,不断优化决策策略。小米特别设计了"跨域奖励函数",使模型能够在不同场景中学习通用的决策原则,而非特定场景的固定模式。
这种多阶段训练策略使MiMo-Embody在保持通用性的同时,在各专业领域也能达到顶尖水平。
性能表现:29项基准测试全面领先
MiMo-Embody在涵盖感知、决策与规划的29项核心基准测试中,全面优于现有开源、闭源及专用模型,展现出卓越的综合性能。
具身智能领域
在具身智能领域的17项Benchmark中,MiMo-Embodied取得了SOTA(最先进)成绩,其中包括:
- CALVIN任务完成率提升12.3%
- RoboTHOR物体识别准确率达94.7%
- Habitat-Nav导航成功率提高18.9%
- Manipulation Suite抓取成功率提升15.6%
特别值得注意的是,在需要跨场景泛化的任务中,MiMo-Embodied的表现尤为突出,比第二名的模型平均高出8.7个百分点。
自动驾驶领域
在自动驾驶领域的12项Benchmark中,MiMo-Embodied刷新了最佳成绩,关键指标包括:
- Waymo开放数据集预测准确率达91.2%
- nuScenes目标检测mAP提升7.8%
- CARLA驾驶任务成功率提高16.5%
- 交通规则遵守率高达98.7%
模型在复杂场景下的表现尤为突出,如恶劣天气、突发障碍物等极端情况下的决策能力比现有模型平均提升13.2%。
通用视觉语言任务
除了专业领域,MiMo-Embody在通用视觉语言任务上也展现出卓越的泛化能力,在VQA、VL任务等通用基准上均达到或接近SOTA水平,证明了其强大的跨领域迁移能力。
应用场景:从家居到出行的全面覆盖
小米计划将MiMo-Embodied率先应用于多个实际场景,展现其跨域能力的实用价值。这些应用不仅验证了模型的技术实力,也为产业发展提供了新思路。
智能家居领域
自研扫地机器人:MiMo-Embodied将赋予扫地机器人更高级的空间理解能力和任务规划能力,使其能够根据家居环境特点智能规划清洁路径,识别并绕过障碍物,甚至根据用户习惯优化清洁策略。
智能家居中枢:作为家庭智能系统的核心大脑,模型能够理解家庭成员的意图,协调各种智能设备,提供个性化的家居体验。
工业制造领域
工厂AGV:在工业环境中,MiMo-Embodied将使AGV具备更精确的环境感知能力和路径规划能力,能够动态调整以适应生产需求变化,提高物流效率。
智能质检系统:结合视觉理解和决策能力,模型可用于自动化质检,识别产品缺陷并判断处理方案。
智能出行领域
SU7高阶智驾:小米汽车SU7将搭载MiMo-Embodied的自动驾驶能力,提供更安全、更舒适的驾驶体验。模型的多场景理解能力使其能够应对各种复杂路况,包括城市拥堵、高速公路、乡村道路等。
车路协同系统:通过将车辆智能与道路基础设施智能相结合,MiMo-Embodied有望实现更高效的交通系统,减少拥堵,提高安全性。
开发者生态
小米计划于2026年Q1起通过OTA推送更新,同时开放模型API,向家居、移动出行、制造业开发者提供跨域智能底座。这一举措将促进MiMo-Embodied在更广泛场景中的应用和创新。
技术挑战与未来发展方向
尽管MiMo-Embody取得了显著成就,但在实际应用中仍面临一些技术挑战,同时也指明了未来发展方向。
现存挑战
计算资源需求:模型的大规模参数和复杂计算需求对硬件提出了较高要求,如何在保持性能的同时优化计算效率是关键挑战。
长尾场景覆盖:虽然模型在29项基准测试中表现优异,但在极端罕见场景下的表现仍有提升空间。
安全性与可靠性:在关键应用如自动驾驶中,确保模型决策的绝对安全和可靠是必须解决的问题。
未来发展方向
多模态融合增强:进一步整合听觉、触觉等多模态信息,构建更全面的感知能力。
自主学习能力:引入持续学习机制,使模型能够从实际应用中不断学习和进步。
边缘计算优化:开发更适合边缘设备的模型版本,扩大应用场景。
跨平台协作:探索多智能体协作的可能性,实现更复杂的系统级智能。
行业影响与意义
MiMo-Embodied的发布不仅是一项技术创新,更对整个AI产业产生了深远影响。
推动跨域融合
这一模型成功打破了自动驾驶与具身智能之间的壁垒,为AI领域的跨域融合提供了成功范例。未来,我们可能会看到更多类似的跨域模型出现,推动AI向更通用、更全面的方向发展。
降低技术门槛
通过开源模型和提供API接口,小米降低了AI技术的使用门槛,使更多开发者和企业能够利用先进AI技术开发创新应用,加速AI技术的普及和应用。
促进产业升级
MiMo-Embodied在智能家居、工业制造、智能出行等领域的应用,将推动相关产业的智能化升级,提高生产效率,改善用户体验,创造新的商业价值。
引发标准竞争
c随着跨域AI模型的发展,可能会形成新的技术标准和生态系统,引发企业间的标准竞争,推动整个行业的技术进步和创新。
结语:迈向通用人工智能的重要一步
MiMo-Embody的发布标志着人工智能在通用化、跨领域融合方面迈出了重要一步。这一模型不仅展示了小米在AI技术方面的实力,也为整个行业提供了新的思路和方向。
随着技术的不断发展和应用的深入,我们有理由相信,像MiMo-Embody这样的跨域AI模型将深刻改变我们的生活方式和工作方式,创造一个更加智能、便捷的未来世界。小米表示,这只是开始,未来将继续投入更多资源在AI基础研究上,推动人工智能技术的边界不断扩展。
在AI技术快速发展的今天,MiMo-Embody的出现提醒我们,真正的智能不是单一领域的专精,而是多领域知识的融合与创新。这一理念不仅适用于AI技术,也为人类解决问题提供了新的思考方式。