在人工智能技术飞速发展的今天,具身智能与自动驾驶已成为最具潜力的两大应用领域。小米近日发布的MiMo-Embodied模型,作为全球首个开源的跨领域具身大模型,成功打破了这两个领域之间的技术壁垒,为多模态交互与跨领域智能的发展开辟了新路径。本文将深入探讨这一创新技术的核心原理、功能特点及其在各个应用场景中的突破性表现。
什么是MiMo-Embodied
MiMo-Embodied是小米推出的革命性AI模型,其独特之处在于成功整合了自动驾驶和具身智能两大前沿领域的任务需求。这一基于视觉语言模型(VLM)架构的突破性系统,通过四阶段精心设计的训练策略,包括具身智能监督微调、自动驾驶监督微调、链式推理微调和强化学习微调,实现了在环境感知、任务规划、空间理解等多方面的卓越性能。
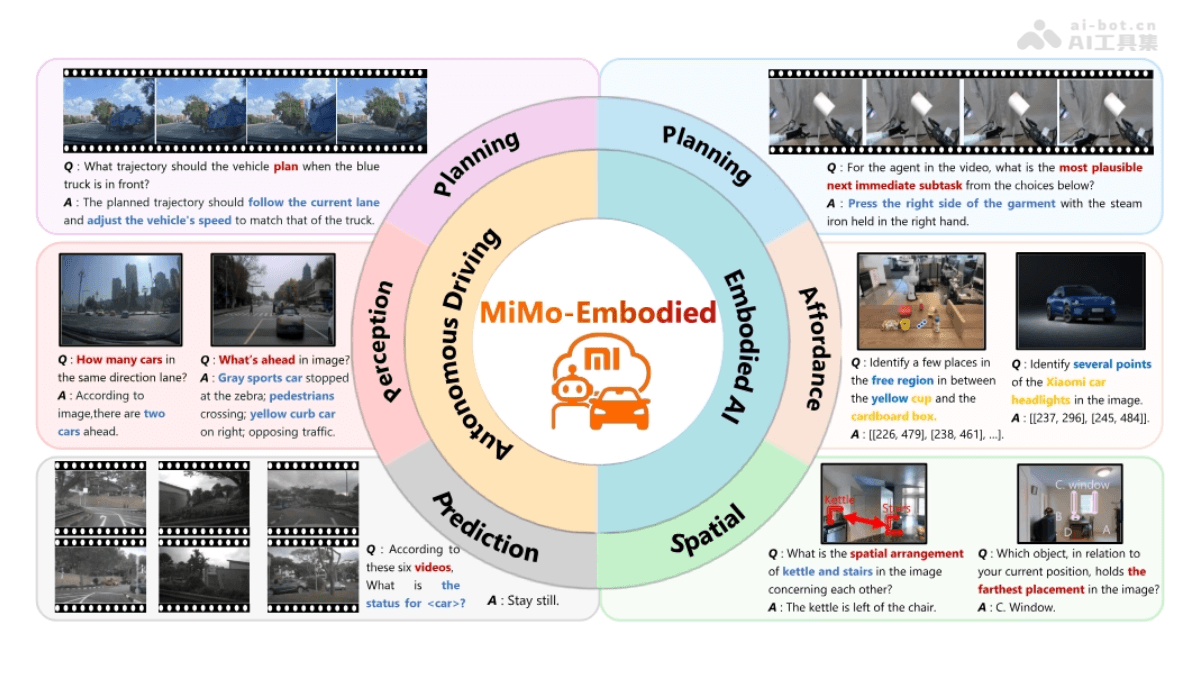
在自动驾驶领域,MiMo-Embodied能够精准感知复杂交通场景,准确预测动态目标行为,并生成安全高效的驾驶规划;而在具身智能领域,该模型能够理解自然语言指令,完成复杂的任务规划和空间推理。值得注意的是,在多项权威基准测试中,MiMo-Embodied的表现超越了现有的开源和专用模型,充分展现了其强大的多模态交互能力和跨领域泛化能力。
MiMo-Embodied的核心功能
跨领域整合能力
MiMo-Embodied最突出的特点是它作为首个成功整合自动驾驶与具身智能任务的模型,全面覆盖了环境感知、任务规划、空间理解等核心能力。这种整合使得模型能够在复杂动态环境中实现高效的多模态交互,为各类智能系统提供了统一的认知框架。
环境感知与理解
在自动驾驶场景中,MiMo-Embodied能够精准理解交通场景,包括识别交通标志、车辆、行人等关键元素,并准确预测其动态行为。这种高级环境感知能力为安全驾驶提供了强有力的技术支持,使系统能够提前预判潜在风险并做出合理决策。
任务规划与执行
在具身智能领域,MiMo-Embodied展现出卓越的任务规划能力。系统能够根据自然语言指令生成可执行的动作序列,完成复杂的任务规划,如机器人导航与操作。这一功能使得智能体能够理解人类意图并将其转化为具体行动,为人机协作提供了新的可能性。
空间理解与推理
MiMo-Embodied具备强大的空间推理能力,能够理解物体之间的空间关系,支持导航、交互和场景理解等任务。这一能力在机器人操作和自动驾驶中的路径规划中尤为重要,使得系统能够在三维空间中做出合理决策。
多模态交互
通过视觉和语言的深度融合,MiMo-Embodied能够处理图像、视频和文本输入,支持多模态任务,如视觉问答、指令遵循和场景描述。这种多模态交互能力打破了传统AI系统的单一输入限制,使机器能够更自然地与人类交流。
强化学习优化
MiMo-Embodied采用先进的强化学习微调方法,显著提升了模型在复杂场景中的决策能力和任务执行的可靠性。通过不断试错和优化,系统能够适应各种边缘情况,确保在真实环境中的高效部署。
开源与通用性
作为完全开源的模型,MiMo-Embodied的代码和模型可在Hugging Face平台获取,为研究者和开发者提供了强大的工具。这种开放性不仅促进了学术研究,也为产业应用创造了更多可能性,有望推动具身智能和自动驾驶领域的创新发展。
技术原理深度解析
跨领域融合架构
MiMo-Embodied采用统一的视觉语言模型(VLM)架构,将自动驾驶和具身智能任务整合到一个模型中。这一架构通过视觉编码器、投影器和大语言模型(LLM)的协同工作,实现了视觉输入与文本理解的深度融合,为跨领域任务处理提供了技术基础。
多阶段训练策略
模型的训练过程采用了精心设计的四阶段策略:首先进行具身智能监督微调,使模型掌握基本的物理交互能力;接着进行自动驾驶监督微调,培养环境感知和决策能力;然后通过链式推理微调提升复杂问题解决能力;最后采用强化学习微调优化实际应用性能。这种渐进式训练方法确保了模型在不同任务和场景下的泛化能力。
视觉输入处理
MiMo-Embodied利用先进的Vision Transformer(ViT)对单图像、多图像和视频进行编码,提取视觉特征并通过多层感知机(MLP)映射到与LLM对齐的潜在空间。这种处理方式实现了视觉与语言的无缝融合,使模型能够同时理解和处理视觉和语言信息。
数据驱动的跨领域学习
模型构建了涵盖通用视觉语言理解、具身智能和自动驾驶场景的多样化数据集,为模型提供丰富的多模态监督信号。这种数据驱动的方法支持模型从基础感知到复杂推理的全面学习,使其能够应对各种实际应用场景。
强化学习优化
在训练的最后阶段,MiMo-Embodied采用Group Relative Policy Optimization(GRPO)算法进行强化学习微调,针对复杂任务和边缘场景优化模型的决策质量和可靠性。这种方法显著提升了模型在实际应用中的表现。
推理与输出生成
通过LLM的强大推理能力,MiMo-Embodied能够将视觉输入与语言指令结合,生成与任务相关的响应和决策。这一能力在自动驾驶中的路径规划和具身智能中的任务执行中发挥关键作用,使系统能够做出合理且可解释的决策。
应用场景分析
自动驾驶领域
MiMo-Embodied在自动驾驶领域展现出巨大潜力。系统能够处理复杂的交通场景,进行环境感知、状态预测和驾驶规划,适用于城市道路、高速公路等多种自动驾驶场景。与传统自动驾驶系统相比,MiMo-Embodied的多模态理解能力使其能够更好地处理复杂交通情况,提高行车安全性。
机器人导航与操作
在具身智能领域,MiMo-Embodied可以根据自然语言指令完成室内导航、物体操作等任务,支持机器人在家庭、工业等环境中的自主行动。这一能力为服务机器人和工业自动化提供了新的技术支持,有望改变人机交互的方式。
视觉问答与交互
MiMo-Embodied适用于视觉问答(VQA)任务,能理解图像或视频内容并回答相关问题,支持人机交互中的信息检索和解释。这一功能在智能客服、教育培训等领域具有广泛应用前景。
场景理解与描述
模型能对复杂场景进行语义理解并生成描述,适用于安防监控、智能交通等领域的场景分析。通过准确理解场景内容,系统能够提供有价值的信息辅助决策,提高监控系统的智能化水平。
多模态任务执行
MiMo-Embodied支持多模态输入,如图像、视频和文本,能处理跨模态任务,如指令遵循、图像标注等,适用于智能助手和自动化系统。这种能力使AI系统能够更自然地融入人类生活和工作环境。
复杂环境中的任务规划
在复杂环境中,MiMo-Embodied能根据指令生成多步任务规划,支持机器人完成清洁、烹饪等复杂任务。这一能力大大扩展了AI系统的应用范围,使其能够处理更复杂的现实世界任务。
技术创新与行业影响
MiMo-Embodied的推出代表了AI技术发展的重要里程碑。首先,它成功解决了具身智能与自动驾驶领域长期存在的模型碎片化问题,通过统一的架构实现了跨领域知识共享和能力迁移。其次,其开源策略加速了技术普及和创新,降低了行业进入门槛,有望促进整个AI生态系统的繁荣。
从行业影响来看,MiMo-Embodied的技术突破将推动多个领域的进步。在自动驾驶领域,它将提高系统的环境理解和决策能力,加速自动驾驶技术的商业化进程;在机器人领域,它将增强机器人的任务规划和执行能力,拓展应用场景;在人机交互领域,它将促进更自然、更直观的交互方式的发展。
未来发展展望
MiMo-Embodied的出现为AI技术的发展指明了新方向。未来,随着技术的不断进步,我们可以期待看到更多基于这一模型的创新应用。一方面,模型本身将继续优化,提升性能和效率;另一方面,基于开源社区的力量,将涌现出更多针对特定场景的定制化应用。
此外,MiMo-Embodied的成功也预示着跨领域AI模型将成为未来发展的主流趋势。通过整合不同领域的知识和能力,这类模型能够在更广泛的场景中发挥作用,推动AI技术的普及和应用。
结语
MiMo-Embodied作为小米推出的全球首个开源跨领域具身大模型,不仅在技术上实现了重大突破,也为AI行业的发展注入了新的活力。通过整合自动驾驶和具身智能两大领域的优势,该模型展现出强大的环境感知、任务规划和空间理解能力,为多模态交互和跨领域智能的发展开辟了新路径。
随着技术的不断进步和应用场景的拓展,MiMo-Embodied有望在自动驾驶、机器人导航、人机交互等领域发挥重要作用,推动AI技术的普及和创新。其开源策略也将促进整个AI生态系统的繁荣,为研究者和开发者提供强大的工具支持。
未来,我们期待看到MiMo-Embodied在更多领域的应用,以及基于这一模型的创新技术的涌现。随着跨领域AI模型的发展,我们有理由相信,AI技术将在更多场景中发挥作用,为人类生活和工作带来更多便利和价值。