在科技飞速发展的今天,3D视觉技术已经渗透到各个领域,成为不可或缺的关键技术。双目3D相机,作为3D视觉领域的重要设备,在工业自动化、机器人技术、人工智能等前沿领域发挥着日益重要的作用。奥比中光的 Gemini 335 和英特尔的 RealSense D435i,作为市场上备受瞩目的两款产品,经常被拿来比较。那么,这两款相机究竟孰优孰劣?本文将通过深入对比分析,为您揭晓答案。
一、奥比中光 Gemini 335:全场景深度图像输出的卓越代表
Gemini 335 作为奥比中光 Gemini 330 系列的首发产品,以其小巧的体积和强大的性能而著称。它采用了高性能的主被动融合双目成像系统,并集成了多种传感器,能够在各种复杂的光照条件和动态环境中,稳定地输出高质量的深度数据。无论是户外强光、室内弱光,还是夜晚等极端环境,Gemini 335 都能提供可靠的深度信息。
那么,Gemini 335 究竟是如何实现全场景高质量深度图像数据输出的呢?其核心技术主要分为两个步骤。在光线较暗的场景下,LDM(激光散斑模块)会主动向物体投射红外散斑,从而增强物体的纹理信息,左右双目模块则负责采集这些增强后的图像纹理信息。而在户外阳光直射的场景下,LDM 投射的激光散斑会被自然光淹没,此时左右双目模块则直接采集自然光下的图像纹理信息。在室内、半室外以及户外非阳光直射的场景下,左右双目模块会融合采集红外散斑增强后的纹理图像以及自然光下的图像纹理。最终,深度引擎处理器 MX6800 接收这些图像数据,并执行深度生成算法,从而输出目标场景的深度图像。
二、英特尔 RealSense D435i:高性能深度相机系列的代表
英特尔 RealSense D400 系列是英特尔公司推出的高性能深度相机系列,该系列产品凭借其卓越的性能和可靠性,在3D视觉领域占据了一席之地。RealSense D435i 作为该系列中的一款代表性产品,集成了 RGB 相机、红外成像、红外 LDM 以及 IMU(惯性测量单元)等多种传感器,虽然缺少 LRM(激光测距模块),但仍然能够提供准确的深度感知能力。然而,与奥比中光的 Gemini 335 相比,RealSense D435i 的成像性能究竟如何呢?为了解答这个问题,我们针对多个典型的应用场景进行了对比测试,结果如下:
三、对比测试:四大场景彰显实力差异,奥比中光 Gemini 335 表现更佳
为了更全面地评估两款相机的性能,我们选择了四个具有代表性的场景进行对比测试,分别是户外阳光环境、复杂物体环境、FOV 大小及 D2C 功能以及运动场景。通过这些测试,我们可以更清晰地了解两款相机在不同应用场景下的优劣势。
对比场景一:户外阳光下的成像效果对比
为了模拟真实的户外应用场景,我们将测试地点选在了夏季晴天下午 2 点的户外草坪,此时的阳光照度超过 50K Lux。在这种强光环境下,深度相机的性能会受到很大的挑战。
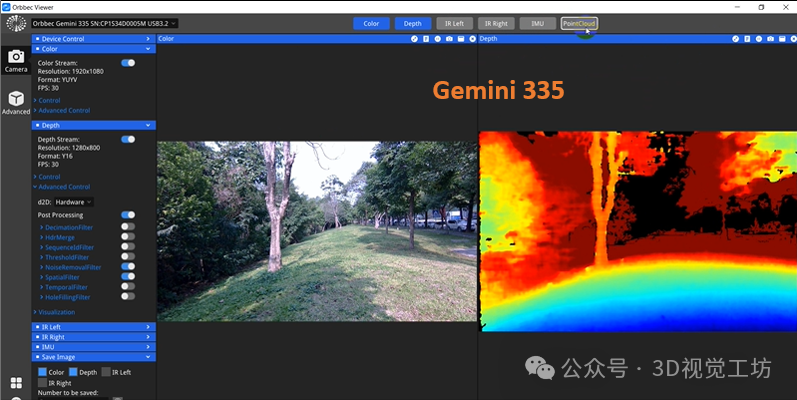
从以上图片可以看出,两款相机都能够在户外阳光的强烈干扰下,输出稳定的深度图,深度效果基本一致。这表明两款相机在户外强光环境下的抗干扰能力都比较出色。然而,在实际应用中,户外环境的光照条件会更加复杂多变,因此我们需要在更多的场景下进行测试,才能更全面地评估两款相机的性能。
对比场景二:复杂场景下的成像效果对比
为了测试相机在复杂环境下的成像能力,我们搭建了一个包含多种物体的场景。该场景包括透明塑料瓶、细小木棍、黑色三脚架、蓝色重复纹理塑料箱以及高反光柱等,这些物体具有不同的材质、纹理和反射特性,对深度相机的成像算法提出了更高的要求。我们将两款相机放置在距离物体约 1.5 米的位置进行拍摄。
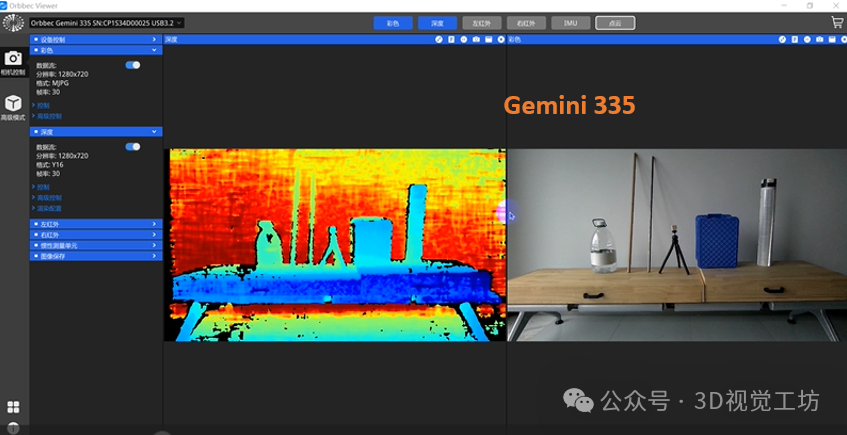
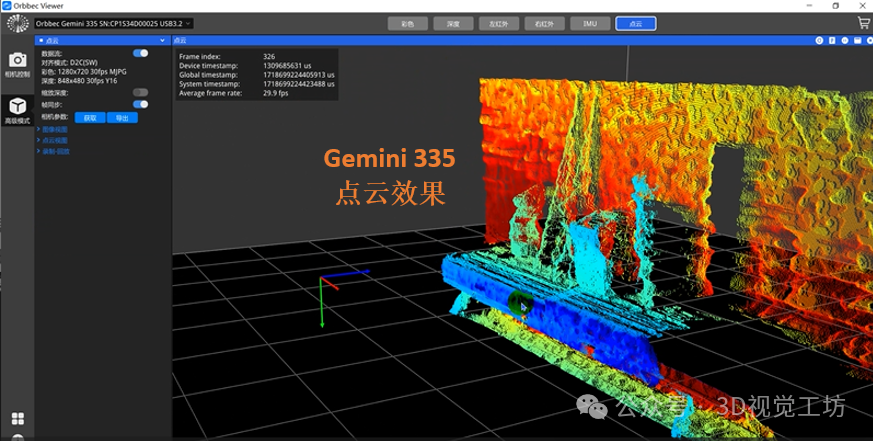
测试结果显示,Gemini 335 在深度成像和点云成像方面均表现出更强的稳定性和完整性,尤其是在面对重复纹理、无纹理以及弱纹理物体时,Gemini 335 的优势更加明显。相比之下,英特尔 RealSense D435i 在处理这些复杂物体时,会出现深度信息缺失或噪点较多的情况。这表明 Gemini 335 在复杂环境下的鲁棒性更强,能够提供更可靠的深度信息。
对比场景三:成像 FOV 大小及 D2C 功能对比
FOV(Field of View,视场角)是指相机能够捕捉到的场景范围,FOV 越大,相机能够看到的范围就越广。D2C(Depth-to-Color)是指深度图与彩色图的对齐功能,该功能可以将深度信息与彩色图像进行融合,从而提供更丰富的场景信息。
为了测试两款相机的 FOV 大小和 D2C 功能,我们在光学标定板上标记了数字【5】和【11】,并将相机放置在距离标定板约 0.3 米的位置进行拍摄。
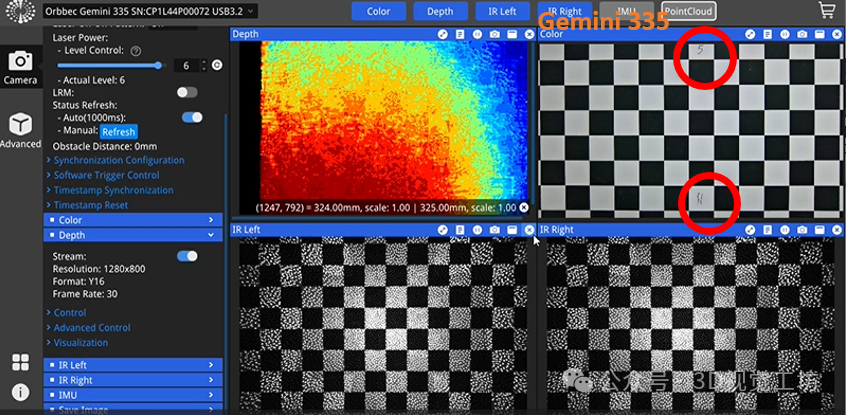
通过对比可以发现,在同等深度距离下,Gemini 335 的成像范围(FOV)比英特尔 RealSense D435i 更大。具体来说,在纵向上,Gemini 335 的成像中包含了数字【5】和【11】,而 D435i 只能看到【11】。在横向上,Gemini 335 覆盖的格子数也更多。这一结果与官方提供的数据相符:

RealSense D435i 深度与 RGB FOV 参数
Gemini 335 深度与 RGB FOV 参数
此外,Gemini 335 还支持硬件 D2C 和软件 D2C(Depth-to-Color:深度与彩色图对齐同步输出),可以实现多分辨率下的深度与彩色图像信息的像素级空间对齐,并在 viewer 中直接输出 2D 的 D2C 图与 3D 的彩色点云图。硬件D2C的优势在于速度更快,效率更高,可以大大降低上位机的算力负担。

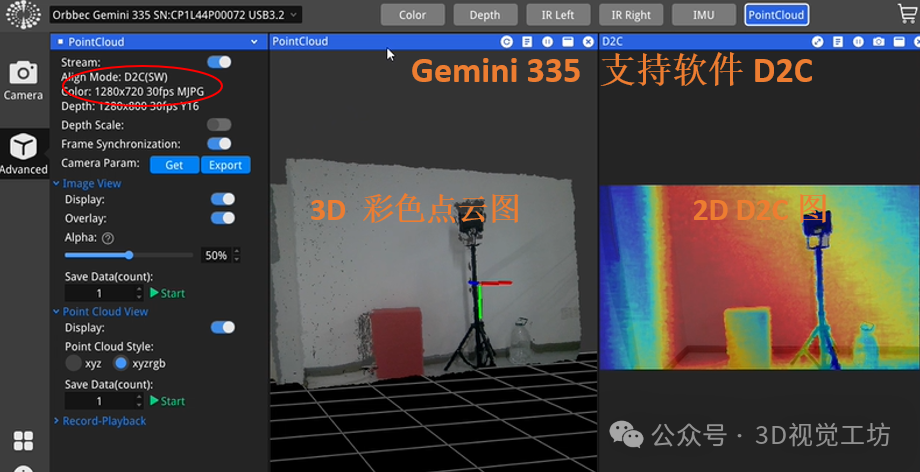
相比之下,RealSense D435/D435i 仅支持软件 D2C,需要通过 SDK 或代码来实现深度与彩色的对齐,这对上位机的算力提出了更高的要求。虽然英特尔 RealSense D435/D435i 也可以输出 3D 的彩色点云图,但图片的平整度不如 Gemini 335。
对比场景四:运动场景成像对比
在实际应用中,深度相机 часто 会被用于运动场景,例如机器人导航、无人机避障等。因此,运动场景下的成像能力也是评估深度相机性能的重要指标。为了测试两款相机在运动场景下的成像能力,我们将两款相机放置在距离桌面带图案纸张相似距离的位置,然后快速摆动相机,观察其成像效果。

测试结果表明,两款相机均可输出真实的 RGB 图像,但 Gemini 335 的运动模糊程度明显低于 RealSense D435/D435i。这表明 Gemini 335 在运动状态下能够更好地捕捉图像细节,从而提供更准确的深度信息。
四、总结:Gemini 335 优势突出
经过以上四个场景的对比测试,我们可以清晰地看到,奥比中光 Gemini 335 在户外阳光、复杂场景以及运动场景下的成像效果均优于英特尔 RealSense D435i,并且具备更大的深度及 RGB FOV,支持硬件与软件 D2C。这使得 Gemini 335 在各种应用场景下都能够提供更稳定、更准确的深度信息。
价格方面,Gemini 335 的官方定价为 1950 元人民币,而 RealSense D435i 的官方定价为 334 美元(约合 2382 元人民币)。从价格上来看,Gemini 335 具有更强的竞争力。
使用体验上,Gemini 335 以及整个奥比中光双目 3D 相机 Gemini 330 系列为用户提供丰富全面的产品支持和出色的用户体验。
1)相机 Viewer 具有 OTA 升级功能,用户可以直接接收固件更新通知或预览工具升级的通知,从而保证设备的稳定运行; 2)支持中英文语言切换,并输出高质量的 metadata 数据(包括点云、纹理、色彩、运动、时间戳等信息); 3)提供配套的 SDK 和使用文档,包括入门指南、进阶指南、代码示例等,便于用户快速开发应用; 4)在配件方面,提供匹配的多机同步集线器和信号连接线,并提供完整的操作指南,方便用户实现多机同步。
在应用场景方面,Gemini 335 凭借其小巧的机身和整机 IP5X 防护等级,非常适合应用于协作机器人、货架机器人、配送机器人等小型机器人以及 AI 视觉应用开发。其在复杂工作环境中表现稳定,为小型机器人的智能化及 AI 视觉应用的拓展提供了有力的支持。
综上所述,奥比中光 Gemini 335 在性能、价格和使用体验等方面均表现出色,是双目 3D 相机领域的佼佼者。如果您正在寻找一款高性能的双目 3D 相机,奥比中光 Gemini 335 绝对是值得考虑的优质之选。
淘宝扫码可了解产品详情,咨询更多

扫码了解奥比中光 Gemini 330 系列详细文档
该款相机配置的传感器有:
[1] 用于深度成像的左右 2 个双目模块 (IR Left, IR Right) [2] 1 个彩色 RGB 模块 (RGB Module) [3] 1 个发射红外散斑的散斑发射模块 (LDM);该模组可通过在应用场景中向物体投射红外散斑以增加纹理信息,提高 3D 相机系统探测深度信息的能力。 [4] 1 个激光测距模块 (LRM);基于光飞行时间原理实现测距功能。LRM 用于补充双目 3D 相机近距盲区内的深度信息,测距范围 0.001m-0.4m,提升 3D 相机对深度测量范围的完整覆盖能力。 [5] 图像信号处理器 (ISP)、相机内置惯性测量单元 (IMU)