在人工智能技术飞速发展的今天,大语言模型(LLM)的文本能力逐渐接近天花板,行业迫切寻求新的突破口。多模态AI,能够同时处理文本、图像、视频等多种数据类型,被视为人工智能的下一个重要发展方向。然而,如何有效融合不同模态的数据,一直是业界面临的重大挑战。智源研究院最新发布的EMU3.5多模态世界大模型,不仅解决了这一难题,更开创了AI发展的全新范式。
从"统一"到"高效":多模态AI的核心突破
多模态AI面临的首要挑战是如何建立一个"大一统"的模型。传统方法往往将不同功能的模型拼接起来,但这会导致融合困难,不同架构间的"语言"并不相通。智源研究院从Emu3开始,就选择了更具挑战性的"原生多模态"路线:使用统一的自回归(Autoregressive)架构。
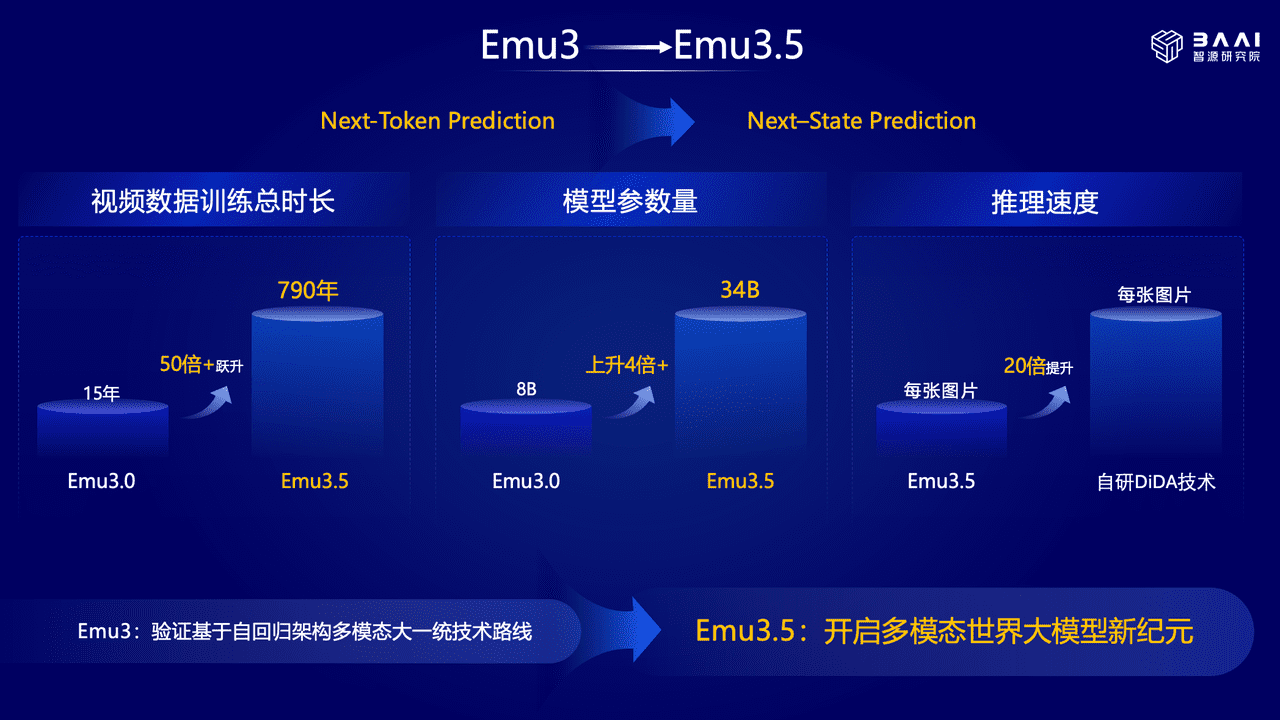
自回归架构作为大语言模型的基石,其核心范式是"Next-Token Prediction"。智源将其创新性地推广到多模态领域,将文本、图像、视频等不同模态的数据统一打散成Token,由模型进行统一预测。这一方法在理论上极其简洁优雅,实现了"图像、文本、视频的大一统"。
然而,这一选择在过去一年里面临着一个致命的"原罪":推理效率太低。当模型生成图像时,需要一个Token一个Token地"吐"出来,这个过程如同"像素点打印",与Diffusion等模型的并行生成方式相比,速度慢了几个数量级。
为了解决这一效率瓶颈,EMU3.5团队提出了名为"DiDA(离散扩散自适应)"的创新技术。DiDA是一种高效的混合推理预测方法,允许自回归模型在推理时并行预测和生成大规模的Token,从根本上改变了"一个点一个点画"的低效模式。
这一突破带来了显著提升:在不牺牲性能的前提下,每张图片的推理速度提升了近20倍。智源研究院院长王仲远表示,这使得EMU3.5的自回归架构"首次使自回归模型的生成效率媲美顶尖的闭源扩散模型"。这一工程上的关键突破,补齐了原生多模态路线的核心短板,证明了这条路不仅在理论上可行,在实践中也具备了"可用性"和"可竞争性"。
第三范式:多模态遇上Scaling Law
在人工智能领域,"Scaling Law"(规模定律)是过去几年最重要的发现之一。它指的是,只要持续增加模型参数、训练数据和算力投入,模型的性能就会相应地可预期地提升。大模型的成功,正是建立在这一"力大砖飞"的信仰之上。
但在多模态领域,这条路径一直不甚明朗。由于技术路线不统一,行业并不确定多模态模型是否存在清晰的Scaling Law。EMU3.5通过DiDA技术解决效率问题后,智源迅速开始了规模化的验证。
从Emu3到EMU3.5的变化清晰地体现了这一规模化进程:
- 模型参数:从8B(80亿)跃升至34B(340亿),提升超过4倍;
- 训练数据:累计的视频数据训练时长,从15年猛增到790年,跃升超过50倍;
- 性能也随之获得了显著提升。
基于这一实践,王仲远在发布会上提出了一个大胆的判断:EMU3.5开启了继"语言预训练"和"后训练及推理"之后的"第三个Scaling范式"。这一判断基于三个关键理由:
架构的统一性:EMU的自回归架构能够大一统地处理各种模态的数据,为规模化提供了简洁的基础。
设施的可复用性:这一架构可以"大规模复用已有的计算基础设施"。这意味着,所有为训练LLM而构建的昂贵智算集群,几乎都可以无缝迁移过来训练EMU模型,极大降低了Scaling的门槛。
强化学习的引入:EMU3.5首次在多模态领域实现了大规模强化学习(RL)。强化学习(尤其是RLHF)是激发LLM高级能力、使其"听话"的关键步骤。如今,智源将这套在语言上被验证过的成熟方案,成功地应用到了更复杂的多模态模型上。
"Scaling范式"的意义在于"可预期"。而EMU3.5的潜力才刚刚开始释放。王仲远在现场提到,目前34B的参数规模,相比LLM动辄万亿的规模还很小;而790年的视频数据量,"只占全互联网公开视频数据不到1%"。这意味着,无论是在模型参数还是在数据维度上,这条路都还有着巨大的提升空间。只要沿着这条路继续"力大砖飞",模型能力的上限远未到来。
从"预测Token"到"预测状态":学习世界规则
如果说,解决效率问题和开启规模化,回答了"怎么做"的问题,那么EMU3.5的另一大转变,则是在回答"学什么"的问题。智源团队在发布会上反复强调"第一性原理"(First Principles)。
王仲远举了一个生动的例子:观察两岁小女孩如何通过刷短视频,学习吃糖葫芦。她观察视频里的人如何操作,然后在现实世界中模仿、尝试、失败、再尝试,最终自己学会了串糖葫芦。他强调人类的学习,不是从文本开始的,而是从对这个世界、对物理规律的视觉观察开始的。
这正是EMU3.5试图模拟的核心理念:AI不应只学习"语言",更应学习"世界"。为此,EMU3.5提出了核心范式的升级:从Emu3的"Next-Token Prediction"(预测下一个词元),升级为"Next-State Prediction (NSP)"(预测下一个状态)。
这一转变意味着模型的目标,不再是机械地"续写"数据(比如预测下一个像素或下一个词),而是要理解事物背后的因果和规律,预测世界在逻辑上的"下一个状态"。
基于此,智源也对"世界模型"这一概念提出了自己的定义。王仲远直言,不完全赞同"世界模型就是视频生成"的观点。他认为,世界模型的核心,是"对于整个世界因果关系、时空、物理建模的能力"。
他用一个"桌边的咖啡"的例子来说明:一个"视频生成模型",也许能预测出"杯子掉落、咖啡洒一地"的逼真画面。但一个"世界模型",首先应该理解"这个杯子放得很危险(状态)",并预测"它很可能会掉落(状态变化)"。更进一步,当接收到"拿起这杯咖啡"的指令时,这个模型会基于对物理常识(纸杯的力度、重心的位置)的理解,来规划"下一步的行动"。
EMU3.5展现出的许多能力,都在印证这种从"理解"到"行动"的进化:
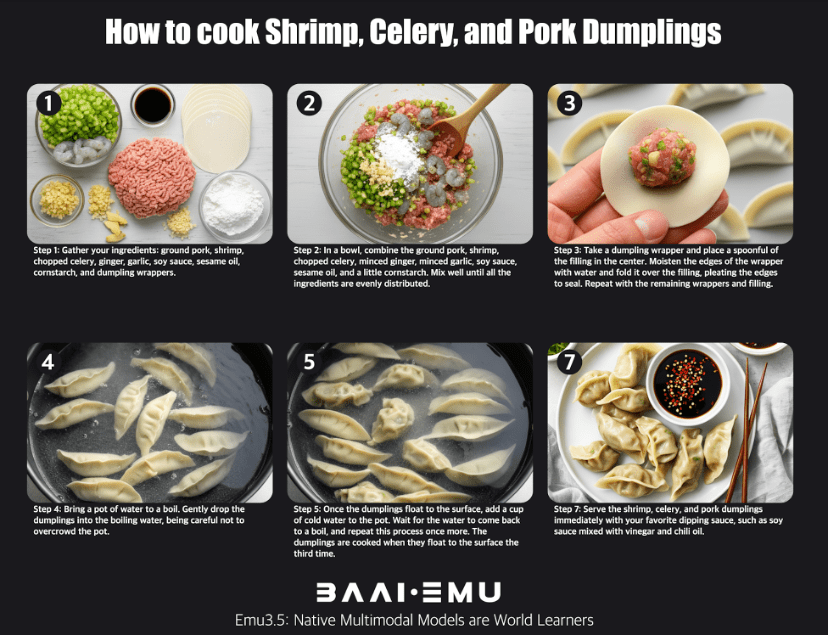
意图规划:当用户输入"如何做芹菜饺子"时,模型输出的不是零散的图片,而是一套图文并茂、步骤清晰的"行动指南"。
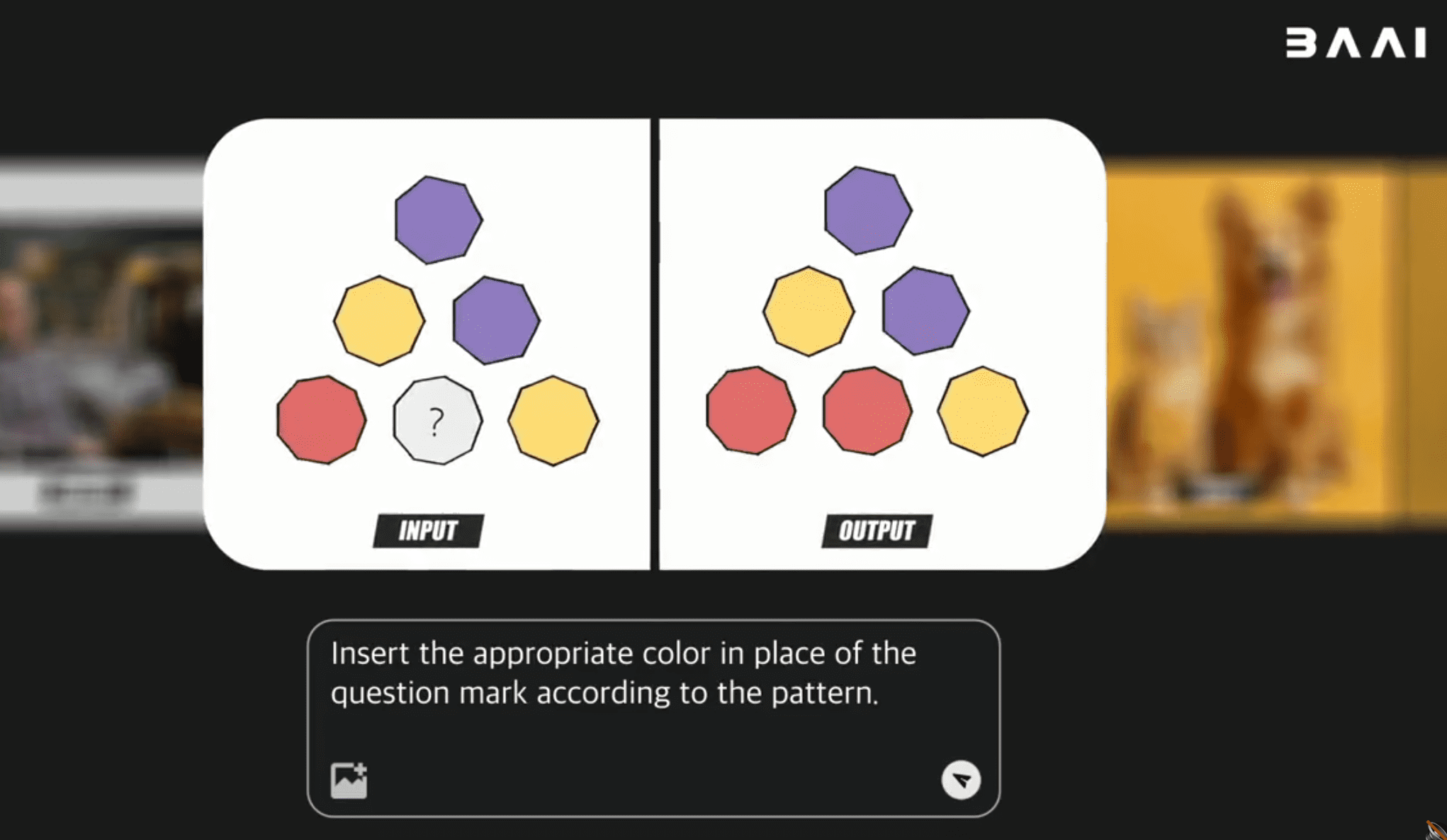
动态模拟与推理:在一个示例中,模型需要根据图案规律,在"?"处填上合适的颜色。这要求模型必须先"理解"图案的排布规则(一种逻辑状态),才能"生成"正确的红色方块(下一个状态)。
时空理解:模型可以将一张建筑的正面图,根据指令转换为"俯视图"。这背后是模型对物体三维空间关系的建模。
这种"预测下一个状态"的能力,最终指向了人工智能的终极应用之一:具身智能(机器人)。具身智能行业目前面临数据匮乏的瓶颈。而EMU3.5这样的世界模型,可以通过对物理世界的理解和模拟,为机器人生成海量、高质量、且多样化的"仿真训练数据"。
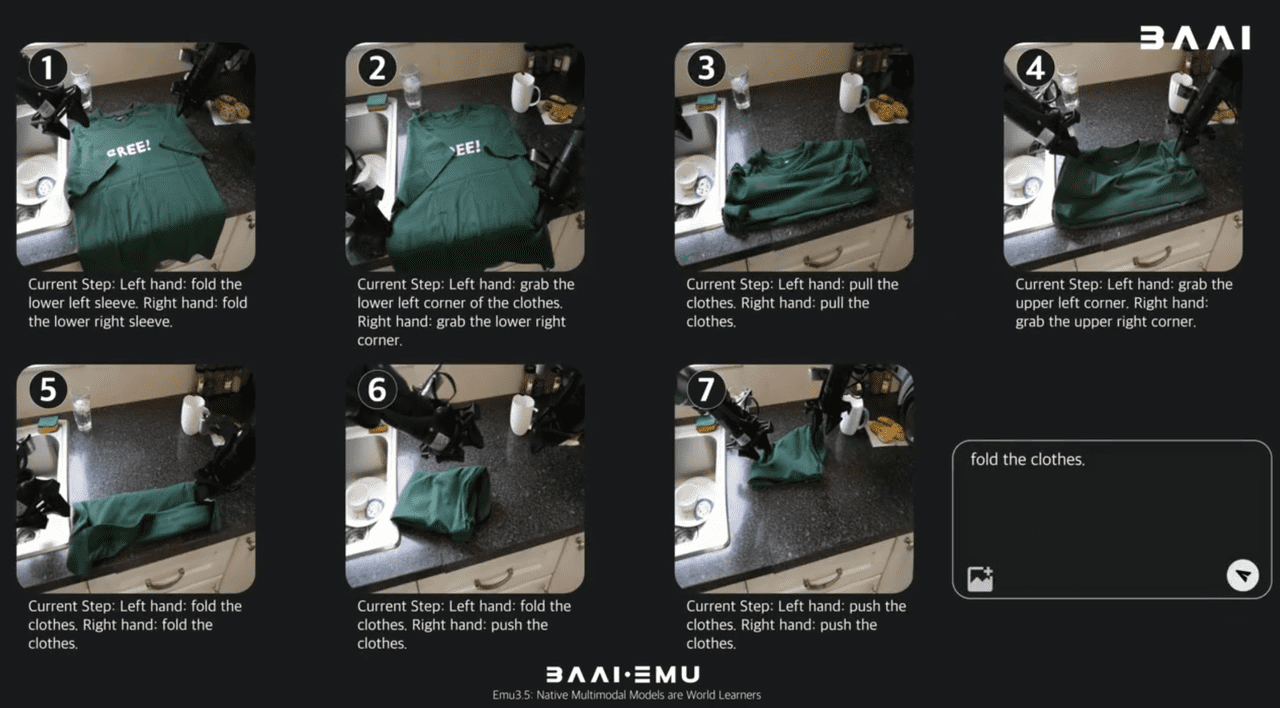
只需一句"叠衣服"的简单指令,Emu3.5便能自主规划、拆解任务,并精确生成机器人完成一整套复杂的折叠动作。王鑫龙博士在交流中提到,利用EMU3.5的世界模型能力,机器人在"没见过的场景"中执行任务,成功率可以"直接(从0%)到70%"。这表明,EMU3.5正在扮演的,是具身智能"大脑"的角色,即提供理解、规划和泛化的核心智能。
结语:新范式下的AI未来
EMU3.5的发布,首先通过DiDA技术,解决了原生多模态自回归架构最致命的"效率"短板。以此为基础,它得以开启"多模态Scaling"的进程,通过堆叠数据和参数来提升能力,并验证了"第三种Scaling范式"的可能性。
而这种规模化的最终目标,是实现一个更宏大的愿景:从"预测Token"转向"预测状态",让AI真正学习这个世界的物理规律和因果关系,为最终实现能够理解并与物理世界交互的通用人工智能,提供了一条坚实的路径。
目前智源已将技术细节在技术报告里披露,并计划在未来开源模型。或许在多模态世界模型这条新赛道上,一个来自中国的"新范式"已经登场,将引领人工智能进入一个全新的发展阶段。