在水资源日益紧张的今天,科学家们不断探索新的水源获取方式。最近,麻省理工学院(MIT)的工程师们开发出一项革命性技术,利用超声波系统从大气水收集材料中快速提取饮用水,将传统方法所需的数小时甚至数天缩短至几分钟。这一突破性进展为解决全球水资源短缺问题提供了新思路,尤其对干旱地区和缺乏传统水源的社区具有重要意义。
传统大气水收集的局限性
大气水收集(AWH)技术近年来发展迅速,科学家们开发出多种海绵状材料,能够从空气中吸收水分并挤压出清洁饮用水。即使在沙漠条件下,空气中仍存在一定湿度,通过适当的材料可以将其转化为可饮用水。
然而,传统的大气水收集系统面临一个关键挑战:水分回收效率低下。现有的设计主要依赖太阳能蒸发材料中的水分,并将其冷凝成水滴。这一过程不仅需要大量能量,而且耗时极长,往往需要数小时甚至数天才能完成。
MIT机械工程系首席研究科学家斯维特拉娜·博里斯金娜(Svetlana Boriskina)解释道:"任何非常擅长捕获水分的材料都不愿意轻易释放这些水分。因此,你需要投入大量能量和宝贵的时间才能从材料中提取水分。"
超声波技术的突破
博里斯金娜团队与研究生伊克拉·伊夫特卡尔·舒沃(Ikra Iftekhar Shuvo)合作,开发出一种创新的超声波装置,能够以高频振动,当水收集材料(称为"吸附剂")放置在装置上时,装置会发出超声波,将水分子从吸附剂中"震"出来。
超声波是频率超过20千赫(每秒20,000个周期)的声压波,人类无法看见或听到如此高频的波。研究团队发现,超声波恰好以合适的频率振动,能够从材料中震出水分子。
"通过超声波,我们可以精确打破水分子与它们所在位点之间的弱键,"舒沃解释道,"这就像水分子在与波浪共舞,这种有针对性的干扰创造了释放水分子的动量,我们可以看到它们以水滴的形式震出。"
装置设计与工作原理
舒沃和博里斯金娜设计了一种新型超声波致动器,用于从大气水收集材料中回收水分。装置的核心是一个扁平的陶瓷环,通电时会产生振动。这个陶瓷环周围有一个外环,上面布满微小喷嘴。从材料中震出的水滴可以通过喷滴落入附着在振动环上方和下方的收集容器中。
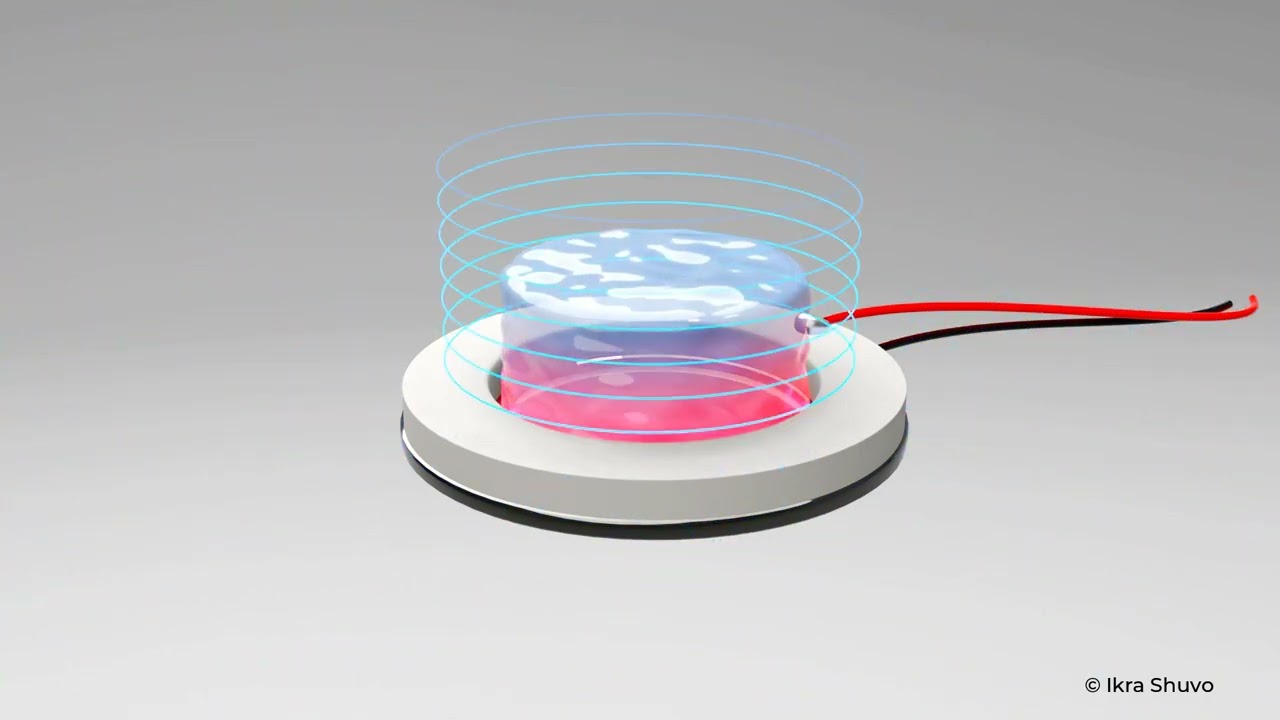
MIT工程师设计的超声波系统可"震"出大气水收集器中的水分。新设计可在几分钟内回收捕获的水,而不是几小时。
研究团队在先前设计的大气水收集材料上测试了该装置。使用四分之一大小的材料样品,团队首先将每个样品放置在湿度室中,设置在不同湿度水平。一段时间后,样品吸收水分并达到饱和状态。然后,研究人员将每个样品放在超声波致动器上并通电,使其以超声波频率振动。在所有情况下,该装置都能在几分钟内震出足够的水分,使每个样品完全干燥。
研究团队计算得出,与使用太阳能相比,超声波设计从同一材料中提取水的效率提高了45倍。
系统优势与应用前景
该系统的最大优势在于其通用性和互补性。博里斯金娜指出:"这个装置的美妙之处在于它完全互补,可以作为几乎任何吸附剂材料的附加组件。"
她设想,一个实用的家庭系统可能由一个快速吸收材料和一个超声波致动器组成,每个大约窗户大小。一旦材料饱和,致动器将由太阳能电池板短暂供电,以震出水。然后材料准备好再次收集水分,在一天内进行多次循环。
"关键在于每天能提取多少水,"她说,"使用超声波,我们可以快速回收水分,一次又一次地循环。这每天可以积累大量水分。"
与传统的热设计不同,该装置确实需要电源。研究团队设想该装置可以由小型太阳能电池板供电,该电池板也可作为传感器,用于检测吸附剂何时已满。它还可以编程为每当材料收集了足够多的水分需要提取时自动开启。通过这种方式,系统可以在一天内的多个周期中从空气中吸收和震出水。
全球水资源解决方案
博里斯金娜表示:"人们一直在寻找从大气中收集水分的方法,这可能是沙漠地区和甚至没有咸水可以淡化的地区的重要水源。现在,我们有了一种快速高效回收水分的方法。"
这项研究得到了MIT阿卜杜勒·拉蒂夫·贾米尔水和食品系统实验室以及MIT-以色列祖克曼STEM基金的部分支持。部分工作是在MIT纳米中心和MIT士兵纳米技术研究所设施进行的。
未来发展方向
这项技术的潜在应用前景广阔。除了为干旱地区提供饮用水外,该系统还可以用于:
- 应急供水:在自然灾害或偏远地区,快速部署便携式大气水收集系统。
- 农业灌溉:为小型农场提供可持续的灌溉水源。
- 军事应用:为部队提供在野外条件下的可靠水源。
- 家庭使用:作为家庭水处理系统的补充,减少对自来水的依赖。
技术挑战与改进方向
尽管这项技术取得了显著进展,但仍面临一些挑战:
- 能源效率:虽然比传统方法高效,但超声波系统仍需外部电源,未来可探索更节能的设计。
- 材料兼容性:需要进一步测试与不同类型吸附剂的兼容性,确保广泛适用性。
- 规模化生产:降低制造成本,使技术能够大规模普及。
- 水质保证:确保提取的水符合饮用水标准,可能需要额外的过滤步骤。
结论
MIT工程师开发的超声波系统为大气水收集技术带来了革命性突破,将水分回收时间从数小时缩短至几分钟,效率提高了45倍。这项创新技术不仅为解决全球水资源短缺问题提供了新思路,也为干旱地区和缺乏传统水源的社区带来了希望。
随着技术的不断发展和完善,这种高效的水提取系统有望在未来几年内实现商业化应用,为全球水资源安全做出重要贡献。正如博里斯金娜所言:"现在,我们有了一种快速高效回收水分的方法。"这不仅是技术上的突破,更是对人类应对水资源挑战的一次重要回应。