
微软在Windows 11操作系统中引入的AI代理功能,标志着人工智能技术向操作系统核心的深度整合。这些被微软称为"agentic"的智能助手,承诺能够自主完成文件整理、会议安排、邮件发送等日常任务,为用户提供"主动的数字协作者",从而提升效率和生产力。然而,正如硬币的两面,这些能够访问用户文件的智能代理也带来了前所未有的安全与隐私挑战。
AI代理:从概念到现实
AI代理是微软在Windows 11中推行的一项革命性功能,旨在通过人工智能技术实现任务的自动化执行。与传统的被动式AI助手不同,这些代理被设计为能够理解复杂指令并在后台自主执行多步骤任务。微软在最新发布的Windows 11测试版本中,加入了"实验性代理功能"开关,以支持名为Copilot Actions的功能。
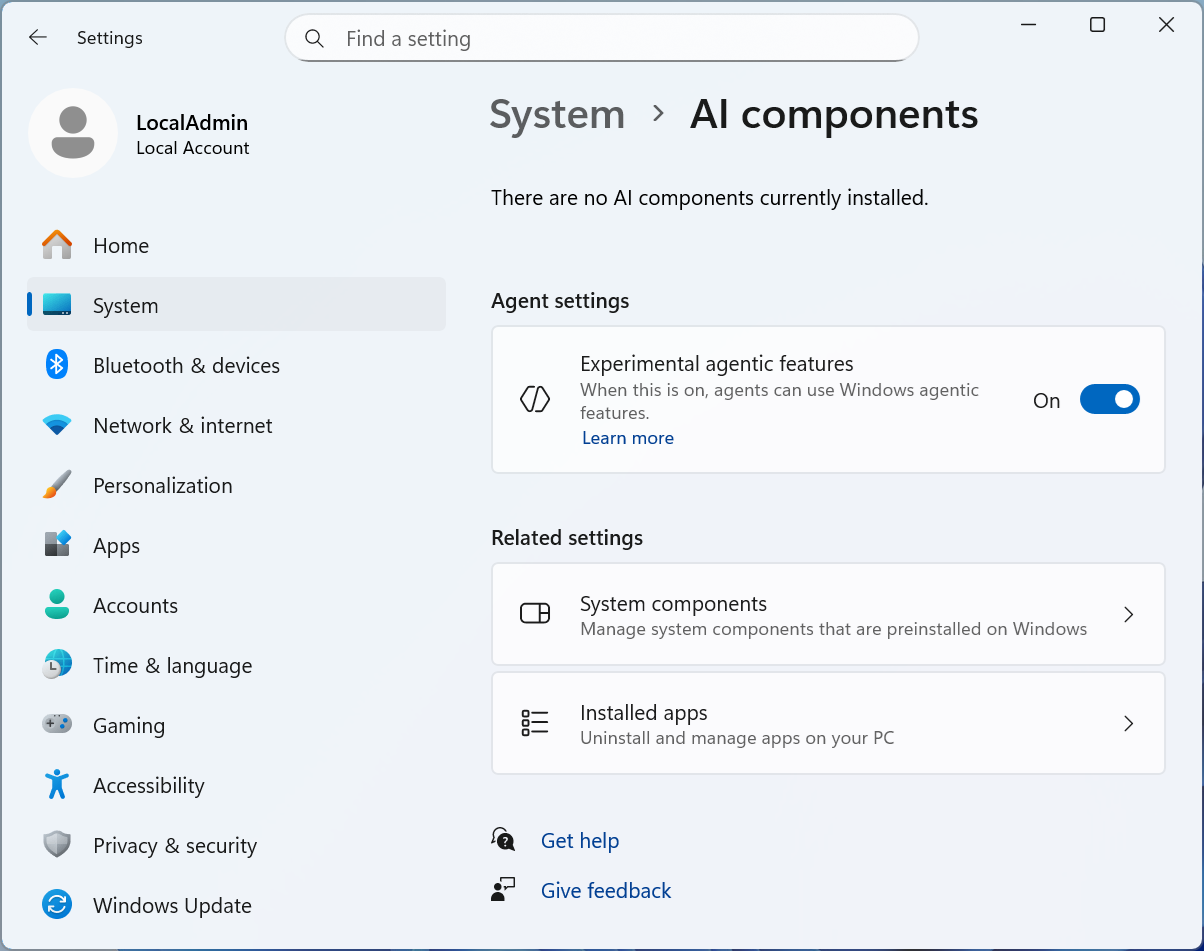
Windows 11中的实验性代理功能设置界面
这些AI代理的工作原理基于微软的先进语言模型和机器学习技术,能够理解用户意图并转化为具体行动。例如,当用户请求"整理上周的会议记录并创建摘要"时,AI代理能够自动定位相关文件,提取关键信息,并生成结构化摘要。
安全风险:AI代理的双刃剑
尽管AI代理功能带来了显著的便利性,但其对用户文件的读写权限也引发了严重的安全担忧。微软官方文档中明确指出,这些代理功能存在"新颖的安全风险",主要集中在以下几个方面:
1. 数据访问权限
AI代理默认能够访问用户账户中的多个文件夹,包括文档、下载、桌面、音乐、图片和视频。这种广泛的文件访问权限意味着代理能够读取和修改大量个人数据,一旦代理被恶意利用,可能导致敏感信息泄露。
2. 账户隔离与权限管理
为缓解安全风险,微软采取了一系列防护措施。首先,AI代理运行在独立于用户账户的专用账户中,确保它们无法修改系统核心组件。其次,代理拥有自己的"桌面"环境,与用户界面隔离,减少直接干扰。此外,用户需要明确批准代理对数据的访问请求,所有代理操作都应该是可观察且可区分的。
3. 活动日志与监督机制
微软要求AI代理必须能够生成详细的活动日志,并提供监督手段,让用户能够查看代理计划执行的多步骤任务。这种透明度设计旨在增强用户对代理行为的控制能力。
4. 跨提示注入攻击(XPIA)
微软特别警告了一种名为"跨提示注入攻击"的威胁,恶意内容可能嵌入在UI元素或文档中,覆盖代理的原始指令,导致数据泄露或恶意软件安装等非预期行为。这种攻击方式利用了AI系统对输入指令的依赖性,通过精心设计的提示注入来操纵代理行为。
微软的安全防护措施
面对这些潜在风险,微软在Windows 11中实施了一系列安全防护措施,试图在功能便利性与安全性之间取得平衡:
默认关闭:实验性AI代理功能默认处于关闭状态,用户需要主动启用。
用户控制:用户可以通过设置界面随时禁用这些功能,保留完全控制权。
权限最小化:代理仅被授予执行特定任务所需的最低权限,避免过度访问。
透明度设计:代理的所有操作都应该是可观察的,用户能够了解代理正在执行的任务。
活动日志:代理必须生成详细的活动日志,便于用户审查和审计。
应用隔离:代理只能访问为所有用户安装的应用程序,无法访问仅限特定用户账户安装的应用。
用户面临的实际挑战
尽管微软实施了这些防护措施,普通用户在实际使用中仍面临诸多挑战:
1. 安全意识不足
许多用户可能不完全理解AI代理的工作原理和潜在风险,容易在不经意间授予过多权限,或忽视安全警告。
2. 权限管理复杂性
随着AI代理功能的增多,用户需要管理复杂的权限设置,这对普通用户来说可能过于技术化。
3. 隐私与便利的权衡
用户需要在享受AI便利和保护个人隐私之间做出权衡,这种决策可能因人而异,缺乏明确标准。
4. 持续的安全威胁
随着AI技术的发展,新的安全漏洞和攻击手段可能不断出现,要求微软持续更新防护措施。
历史教训:从Windows Recall到AI代理
微软在AI代理功能上的谨慎态度,部分源于去年Windows Recall功能的教训。该功能因数据收集问题而引发广泛批评,最终被迫重新设计。这一经历使微软更加重视用户对AI功能的隐私和安全关切,并在AI代理设计中采取了更为透明的风险沟通策略。
未来展望:AI代理的发展方向
Windows 11 AI代理代表了操作系统智能化的重要一步,其未来发展可能呈现以下趋势:
更精细的权限控制:开发更细粒度的权限管理系统,让用户能够精确控制代理对不同数据和应用访问权限。
增强的透明度:改进代理行为的可视化展示,让用户更直观地了解代理正在执行的任务和访问的数据。
安全技术的进步:集成更先进的安全技术,如行为分析和异常检测,及时发现并阻止潜在的安全威胁。
用户教育:加强用户教育,提高用户对AI功能风险的认识,促进更安全的使用习惯。
监管与标准:随着AI技术的普及,可能需要建立更完善的行业标准和监管框架,规范AI代理的开发和使用。
结论:谨慎前行
Windows 11 AI代理功能代表了人工智能技术与操作系统深度融合的趋势,为用户带来了前所未有的便利性。然而,这种便利性伴随着不容忽视的安全与隐私风险。微软在设计中采取了多种防护措施,试图在功能与安全之间取得平衡,但最终的安全保障仍依赖于用户的谨慎使用和持续的安全更新。
对于普通用户而言,理解AI代理的工作原理,合理设置权限,定期审查活动日志,是保护个人数据安全的关键。同时,科技公司和监管机构也需要共同努力,建立更完善的AI安全标准和防护机制,确保人工智能技术在提升用户体验的同时,不损害用户的隐私和安全权益。
在AI技术快速发展的今天,Windows 11 AI代理只是开始,未来将会有更多智能功能融入我们的数字生活。如何在享受技术便利的同时保护自身权益,将成为每个数字公民必须面对的重要课题。








