
在科技巨头持续探索人工智能商业化的道路上,Google迈出了关键一步——将生成式AI深度整合到在线购物体验中。随着2025年假日购物季的临近,Google正式推出了AI模式搜索中的对话式购物功能,这一举措不仅标志着Google在AI商业化领域的重大突破,更预示着传统电商搜索与购买流程即将迎来一场深刻变革。
AI驱动的购物体验重构
Google在2025年5月的I/O大会上首次宣布了将对话式购物引入AI模式的计划。如今,这一愿景正在成为现实。通过利用其庞大的"购物图谱"(Shopping Graph)——一个包含海量零售商数据的综合数据库,Google声称其AI系统能够提供前所未有的个性化购物建议。
在接下来的几周内,美国用户将能够向AI模式提出复杂的购物问题,系统将提供产品建议、购买指南、比较表格以及其他生成内容,帮助消费者做出更明智的购买决策。正如Google所强调的,这种生成式AI体验伴随着与所有AI系统相同的免责声明——可能存在错误或不准确信息。
"我们的购物图谱使我们能够理解数十亿产品及其关系,"Google产品经理在最近的一次声明中表示,"这让我们能够训练出真正理解购物意图的AI模型,而不仅仅是匹配关键词。"
广告与AI搜索的平衡艺术
随着AI模式购物功能的推出,一个不可避免的问题浮出水面:消费者将在这些AI驱动的体验中看到多少广告?Google明确表示,AI模式中的一部分内容将是广告,这与传统搜索结果中的购物广告类似。
"我们正在测试不同的广告展示方式,"Google发言人解释道,"用户可能会看到没有广告、多种风格的广告,或者完全没有广告的情况。目前这仍处于测试阶段,我们会根据用户反馈不断优化。"
值得注意的是,购物功能也将扩展到Gemini应用中,但Google表示短期内不会在这些结果中包含赞助内容。这一差异化策略可能是为了避免过度商业化影响AI助手的核心用户体验。
智能代理结账:AI从信息到行动的跨越
在I/O大会上被简要提及的"智能代理结账"(Agentic Checkout)功能如今正成为Google AI购物战略的核心。这一功能标志着AI从提供信息向执行行动的重要转变。
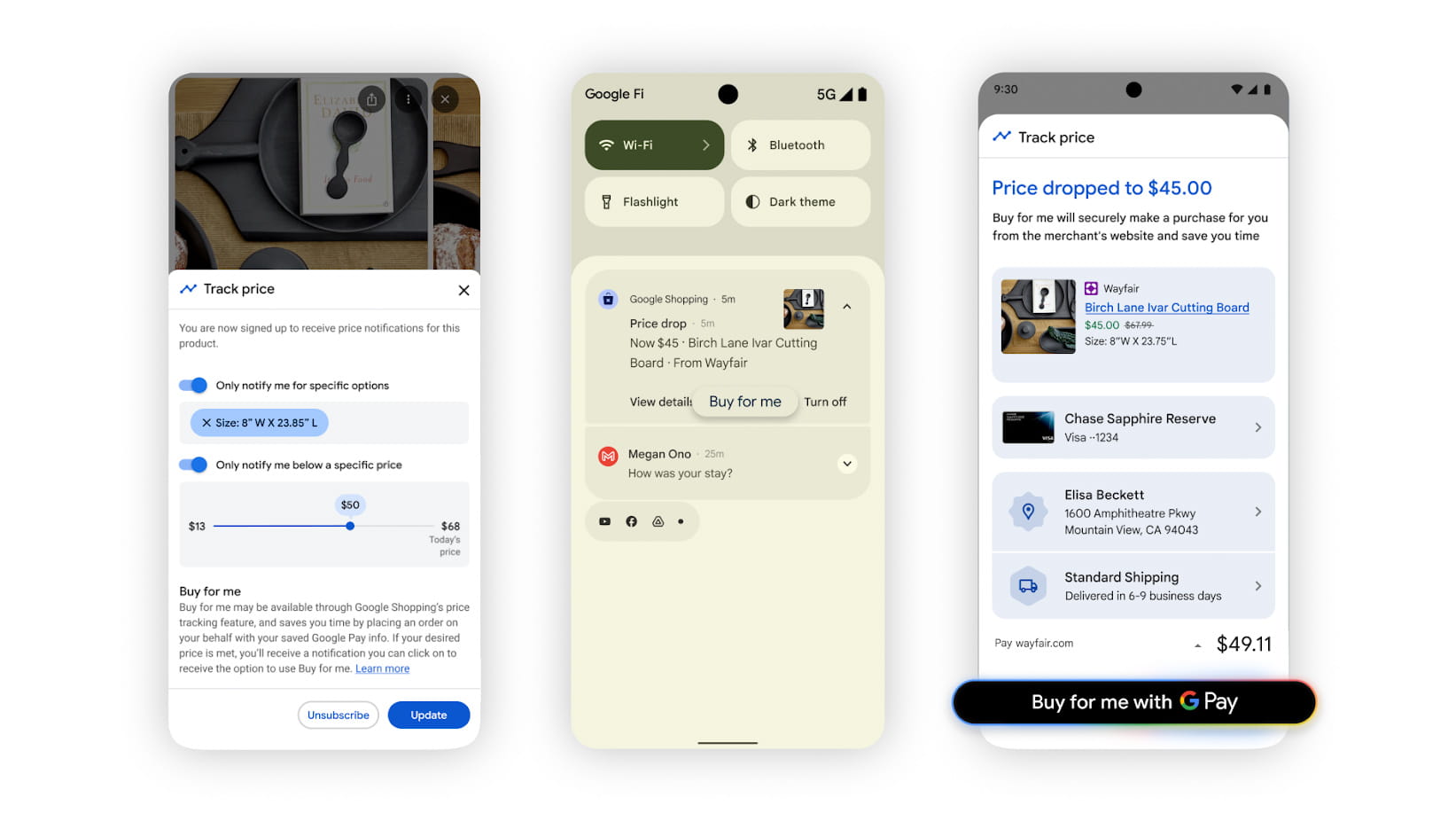
智能代理结账的工作原理是:用户可以在搜索中为特定产品设置价格阈值,当商品达到该价格时,系统会发送通知。收到通知后,用户可以使用Google Pay授权自动购买。目前,这一功能仅支持少数零售商,如Chewy、Wayfair和一些Shopify商家。
Google认为这一功能真正体现了"代理"特性,因为它能够将网站上的视觉信息转化为具体行动——选择正确的款式、尺码和颜色,添加到购物车并完成购买。"这不仅仅是价格监控,"Google的产品团队解释,"AI能够理解产品页面上的信息,并代表用户完成购买流程。"
重新启用的Duplex:库存查询的新应用
在当前的AI热潮之前,Google曾热衷于展示Duplex——一款基于Assistant的AI,旨在通过电话执行现实世界任务。Google曾认为人们会信任AI查询营业时间和预约服务,但这一功能并未获得太多关注,Duplex的提示随Assistant逐渐消失。
现在,Duplex带着Google所称的"重大Gemini模型升级"回归。虽然不再负责预约服务,但Google仍计划使用更新后的Duplex让用户致电商家。这一次,Duplex的目标是帮助消费者避免亲自打电话查询库存可用性。
当用户搜索附近特定产品时,将看到"让Google致电"的选项。用户需要指定想要的具体产品,机器人便会开始拨打电话。Google表示,机器人在拨打电话时会表明自己的身份,且只会在营业时间和合理冷却期后进行呼叫。如果商家感到困扰,仍然可以选择退出Duplex呼叫服务。
最终,用户将通过电子邮件或短信收到通话的AI摘要,这可能有助于决定去哪里购买。这些消息还可能基于Google的购物图谱包含附近其他商店的本地库存数据。虽然这听起来可能意味着更多赞助链接,但目前尚不明确。这一功能今天开始在玩具、化妆品和电子产品等类别推出,同样仅限美国用户。
技术挑战与用户隐私考量
尽管Google的AI购物功能前景广阔,但技术挑战和用户隐私问题不容忽视。AI系统在理解复杂的购物意图和提供准确建议方面仍面临困难,特别是在处理高度专业化或新兴产品类别时。
"AI可以很好地处理标准产品,"一位电商技术专家分析道,"但当涉及到特定领域或新兴产品时,AI的理解能力可能会受到限制。此外,AI生成的内容可能包含过时或不准确的信息,这对购物决策至关重要。"
在隐私方面,Google的购物图谱收集了大量用户数据,这引发了关于数据使用和保护的担忧。Google表示,所有AI购物功能都遵循严格的数据保护政策,用户可以控制自己的数据使用方式。
市场影响与竞争格局
Google推出AI购物功能正值电商AI竞争加剧之际。亚马逊、微软和其他科技巨头也在探索将AI整合到购物体验中的方法,但Google凭借其搜索主导地位和庞大的购物图谱,在这一领域具有独特优势。
"Google的搜索数据使其能够理解用户的购物意图,"一位行业分析师指出,"这是其他竞争对手难以复制的优势。此外,Google可以将AI购物功能与其搜索、地图、支付等生态系统无缝整合,创造更连贯的用户体验。"
对于传统电商平台来说,Google的AI购物功能既是挑战也是机遇。一方面,它可能改变消费者发现和购买产品的方式;另一方面,它也为传统零售商提供了接触Google庞大用户群的新途径。
未来展望:AI购物的发展方向
展望未来,Google的AI购物功能可能会朝着更加个性化和自动化的方向发展。随着AI技术的进步,我们可以期待看到更复杂的产品推荐、更智能的购买决策支持,以及更无缝的结账体验。
"AI购物不仅仅是回答问题,"Google的产品负责人表示,"最终目标是创造一个真正理解消费者需求的购物助手,能够预测需求、提供个性化建议,并简化购买流程。"
此外,随着AR/VR技术的发展,AI购物可能会与虚拟试衣间、3D产品展示等功能结合,创造更加沉浸式的购物体验。Google已经在这方面进行了初步探索,未来可能会进一步扩展这些功能。
消费者视角:便利与担忧并存
从消费者的角度来看,Google的AI购物功能带来了显著的便利性。智能产品推荐可以节省大量搜索时间,价格监控功能有助于找到最佳交易,而智能代理结账则简化了购买流程。
"作为一个经常网购的人,我真的很期待这些功能,"一位消费者测试者分享道,"特别是价格监控和自动购买,这真的能帮我省下不少时间和金钱。"
然而,消费者也对AI购物功能存在一些担忧。包括对AI推荐准确性的疑虑,对数据隐私的担忧,以及对过度商业化的顾虑。这些担忧表明,Google需要在技术创新和用户信任之间找到平衡。
结语:AI购物时代的到来
Google推出的AI购物功能标志着电子商务进入了一个新时代。通过将生成式AI与购物体验深度融合,Google不仅提升了用户的购物体验,也为自身开辟了新的收入来源。随着这些功能的不断完善和扩展,我们可以期待看到一个更加智能、个性化和便捷的购物环境。
然而,AI购物的发展仍面临技术、隐私和伦理等多方面的挑战。Google需要谨慎处理这些问题,确保AI购物功能能够在提升用户体验的同时,保护用户权益并维护公平竞争的市场环境。
在这个AI驱动的购物新时代,消费者、零售商和科技平台都需要适应新的规则和期望。对于那些能够拥抱变化并有效利用AI技术的参与者来说,未来的购物世界充满了无限可能。








