
在人工智能视觉领域,三维空间重建技术一直是研究的热点与难点。近日,字节跳动Seed团队推出了Depth Anything 3(DA3),这一革命性的视觉空间重建模型通过创新架构设计,实现了从任意视角的视觉输入中高效恢复三维空间几何结构的能力。本文将深入解析Depth Anything 3的技术原理、功能特点及其在各领域的应用前景,探讨这一模型如何推动三维视觉重建技术的边界。
什么是Depth Anything 3
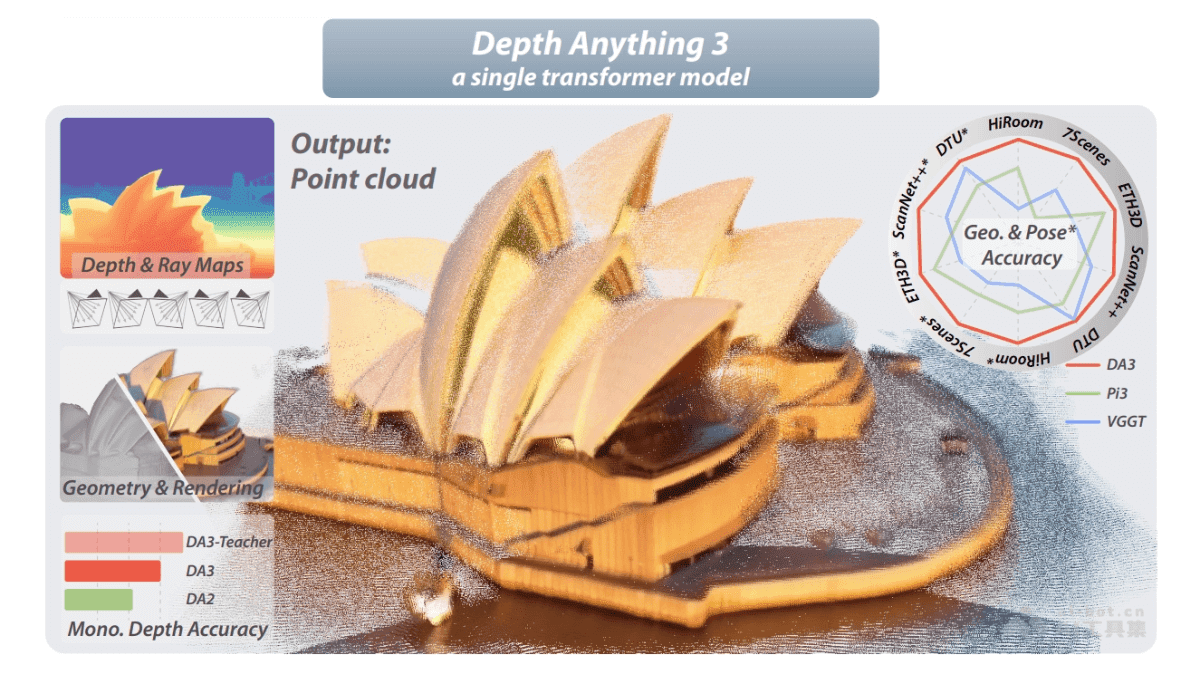
Depth Anything 3(DA3)是字节跳动Seed团队推出的视觉空间重建模型,其核心突破在于通过单一Transformer架构实现从任意视角的视觉输入中恢复三维空间几何结构。与传统的三维重建方法相比,DA3采用创新的"深度-射线"表征法,无需复杂的多任务训练,显著简化了模型设计。这一创新使DA3在相机姿态精度和几何重建精度上超越了此前的主流模型,同时保持了高效的推理速度。
DA3的出现标志着三维视觉重建领域的重要进步,它不仅解决了传统方法在复杂场景下的局限性,还通过简洁的架构设计实现了高性能与高效率的平衡。这一模型为自动驾驶、机器人导航、虚拟现实等领域提供了全新的技术解决方案,有望推动相关应用的快速发展。
Depth Anything 3的核心功能
多视角空间重建
DA3最突出的功能之一是其强大的多视角空间重建能力。模型能够从任意数量的视觉输入(包括单张图片、多视角图像或视频流)中重建出完整的三维空间结构。这一特性使得DA3能够处理各种复杂场景,无论是静态的室内环境还是动态的室外场景,都能生成准确的三维表示。
与传统的三维重建方法相比,DA3的多视角重建具有更高的灵活性和鲁棒性。它不需要预先校准相机参数,也不依赖于特定的场景类型,这使得它在实际应用中具有更广泛的适用性。无论是建筑测绘、文化遗产保护还是虚拟现实内容创建,DA3都能提供高质量的三维重建结果。
相机姿态估计
相机姿态估计是三维视觉重建中的关键任务,DA3在这一任务上表现出色。模型能够准确估计输入图像的相机姿态(包括位置和方向),即使在没有任何已知相机参数的情况下也能实现高精度估计。这一功能对于需要精确知道相机位置的应用场景至关重要,如自动驾驶、机器人导航等。
DA3的相机姿态估计能力源于其创新的"深度-射线"表征法和跨视图自注意力机制。通过深度图和射线图的联合预测,模型能够准确恢复相机在三维空间中的位置和朝向,为后续的三维重建任务提供基础支持。
单目深度估计
单目深度估计是计算机视觉中的经典难题,DA3在这一任务上取得了显著突破。模型能够从单张图像中预测出像素级的深度信息,为三维场景理解提供基础支持。这一能力使得DA3在只有单个摄像头的情况下,也能实现高质量的三维重建。
传统的单目深度估计方法通常需要大量的训练数据和复杂的后处理步骤,而DA3通过其创新的架构设计,能够在单次前馈过程中生成高精度的深度图。这不仅提高了效率,还减少了误差累积,使得深度估计结果更加可靠。
新视角合成
新视角合成是DA3的另一项重要功能,通过与3D高斯渲染技术结合,模型能够生成从未知视角观察的高质量图像。这一功能在虚拟现实和增强现实领域具有广泛应用,可以用于创建沉浸式的虚拟环境或实现虚拟物体与现实场景的无缝融合。
DA3的新视角合成能力基于其准确的三维空间重建结果。通过深度图和射线图的联合预测,模型能够准确理解场景的三维结构,从而从任意视角生成一致的图像。这一特性使得它在虚拟现实内容创建、数字孪生等领域具有重要应用价值。
高效推理与部署
在保持高性能的同时,DA3还注重推理效率和资源消耗的优化。模型的简洁架构设计使其在推理速度和资源消耗上具有显著优势,能够快速处理大规模场景,适用于移动端和嵌入式设备的部署。
这一特性使得DA3能够在资源受限的设备上运行,如自动驾驶汽车、移动机器人等。与传统的三维重建方法相比,DA3不需要大量的计算资源和复杂的后处理步骤,大大降低了部署门槛,为实际应用提供了更多可能性。
Depth Anything 3的技术原理
单一Transformer架构
DA3采用单一的Transformer模型(如DINOv2)作为基础架构,无需复杂的定制化设计。这一选择基于Transformer架构在处理视觉任务中的强大表现,特别是其自注意力机制能够灵活处理任意数量的输入视图,动态交换跨视图信息,实现高效的全局空间建模。
与传统的三维重建方法相比,单一Transformer架构具有更高的灵活性和可扩展性。它能够自然地处理不同数量的输入视图,从单目到多视图都能适应,而且不需要针对特定任务进行复杂的架构调整。这种设计大大简化了模型的开发和维护过程,同时也提高了模型的鲁棒性。
深度-射线表征法
DA3最核心的创新在于其提出的"深度-射线"表征法。这一方法通过预测深度图和射线图来完整描述三维空间,其中深度图提供像素到相机的距离,射线图描述像素在三维空间中的投影方向。这种表征方式自然地解耦了空间几何与相机运动,简化了模型输出,同时提高了精度和效率。
传统的三维重建方法通常需要输出完整的点云或网格表示,这些表示不仅计算复杂,而且难以处理大规模场景。而深度-射线表征法通过深度和射线两个简单的图结构,就能完整描述三维空间,大大降低了计算复杂度,同时保持了高精度。
输入自适应的跨视图自注意力机制
为了有效处理多视图输入,DA3引入了输入自适应的跨视图自注意力机制。这一机制通过动态重排输入视图的token,实现高效的跨视图信息交换。具体来说,模型会根据输入视图的几何关系和内容相似性,自动调整token之间的注意力权重,从而实现更准确的空间建模。
这种机制使DA3能够灵活处理从单目到多视图的各种输入场景,无论是单个图像还是多个视角的图像序列,都能生成高质量的三维重建结果。与传统方法相比,输入自适应的跨视图自注意力机制更加灵活和高效,能够更好地捕捉场景的全局几何结构。
双DPT头设计
为了联合预测深度和射线图,DA3设计了双DPT头结构。两个预测头共享特征处理模块,在最终融合阶段分别优化深度和射线图的输出,增强两个任务之间的交互和一致性。这种设计既保证了两个任务的独立性,又促进了它们之间的协同作用。
深度预测头负责估计像素到相机的距离,而射线预测头负责确定像素在三维空间中的投影方向。两个预测头共享特征提取部分,但在输出阶段分别优化,这种设计既减少了模型参数,又提高了预测精度。实验表明,双DPT头设计在深度和射线预测上都取得了比单头设计更好的性能。
教师-学生训练范式
DA3采用教师-学生训练范式,通过在合成数据上训练的教师模型生成高质量的伪标签,为学生模型提供更准确的监督。这一训练策略解决了真实标注数据稀缺的问题,使得模型能够在有限的标注数据上取得更好的性能。
具体来说,教师模型首先在大量合成数据上进行预训练,然后生成高质量的伪标签。这些伪标签随后用于训练学生模型,学生模型的目标是尽可能接近教师模型的预测结果。这种训练范式不仅提高了模型的性能,还增强了模型的泛化能力,使其在真实场景中也能表现出色。
一步完成高精度输出
传统三维重建方法通常需要多次迭代优化才能得到高精度的结果,而DA3通过一次前馈就能生成高精度的深度和射线图,无需传统方法中的多次迭代优化。这种设计显著提升了推理速度,简化了训练和部署流程,同时确保三维重建的精确性和高效性。
一步完成高精度输出的能力源于DA3创新的架构设计和表征方法。通过深度-射线表征法和双DPT头设计,模型能够在单次前馈过程中同时优化深度和射线预测,避免了传统方法中的误差累积和迭代优化过程。这一特性使得DA3在实际应用中具有更高的效率和可靠性。
Depth Anything 3的应用场景
自动驾驶
在自动驾驶领域,DA3能够从车辆摄像头拍摄的多视角图像中快速重建三维环境,帮助自动驾驶系统更准确地感知周围物体的距离和位置,提升决策的可靠性和安全性。传统的自动驾驶系统依赖于激光雷达等昂贵的传感器,而DA3仅通过摄像头就能实现高精度的三维重建,大大降低了系统成本。
DA3的实时性和高精度使其能够在车辆行驶过程中持续更新环境的三维模型,为路径规划、障碍物检测和决策提供准确的空间信息。这一能力对于提升自动驾驶系统的安全性和可靠性具有重要意义,特别是在复杂城市环境和恶劣天气条件下。
机器人导航
对于机器人导航任务,DA3通过实时重建环境的三维结构,为机器人提供精确的地形和障碍物信息,支持其在复杂环境中进行高效导航和路径规划。与传统的SLAM(同步定位与地图构建)方法相比,DA3不需要预先构建地图,能够直接从视觉输入中生成环境的三维表示,大大简化了导航系统的设计。
DA3的高效推理能力使其能够在资源受限的移动机器人上运行,为室内外环境中的自主导航提供支持。无论是家庭服务机器人、工业机器人还是救援机器人,DA3都能提供准确的环境感知能力,帮助机器人更好地理解周围环境,做出更智能的决策。
虚拟现实和增强现实
在虚拟现实(VR)和增强现实(AR)领域,DA3能够将现实场景快速转换为高精度的三维模型,用于虚拟现实中的场景重建或增强现实中的虚拟物体融合,提升用户的沉浸感。传统的VR/AR内容创建需要大量的人工建模工作,而DA3能够从简单的视觉输入中自动生成高质量的三维模型,大大降低了内容创建的门槛。
DA3的新视角合成能力使得用户能够从任意角度观察虚拟场景,增强了VR/AR体验的真实感和沉浸感。无论是游戏、教育还是工业培训,DA3都能为VR/AR应用提供高质量的三维内容,推动这些技术的普及和应用。
建筑测绘与设计
在建筑领域,DA3能够从建筑场景的多视角图像中重建出详细的三维点云,为建筑测绘、室内设计和虚拟建筑漫游提供高效的数据支持。传统的建筑测绘需要专业人员和昂贵设备,耗时耗力,而DA3仅通过简单的图像采集就能实现高精度的三维重建,大大提高了工作效率。
DA3的高精度和高效性使其能够在建筑设计、施工和运维的各个阶段发挥作用。从初步的概念设计到详细的施工图,再到后期的运维管理,DA3都能提供准确的三维数据支持,帮助建筑师和工程师更好地理解和设计建筑空间。
文化遗产保护
文化遗产保护是DA3的另一重要应用领域。通过使用DA3重建历史建筑或文物的三维结构,研究人员可以进行数字化保护、修复研究及虚拟展示,帮助文化遗产的传承和推广。传统的文物记录和修复工作需要大量时间和资源,而DA3能够快速生成文物的三维模型,为保护和研究提供数据支持。
DA3的高精度重建能力使得文物的细节能够被准确记录和保存,为后续的修复工作提供参考。同时,通过虚拟展示,更多的人能够了解和欣赏这些珍贵的文化遗产,促进文化的传播和交流。这一应用不仅有助于文化遗产的保护,也为文化旅游和教育提供了新的可能性。
Depth Anything 3的项目资源
对于想要深入了解或使用Depth Anything 3的研究者和开发者,字节跳动团队提供了丰富的项目资源:
- 项目官网:https://depth-anything-3.github.io/ 提供了模型的详细介绍、演示和应用案例
- GitHub仓库:https://github.com/ByteDance-Seed/depth-anything-3 包含模型的源代码、预训练模型和详细的使用说明
- arXiv技术论文:https://arxiv.org/pdf/2511.10647 详细介绍了DA3的技术原理和实验结果
- 在线体验Demo:https://huggingface.co/spaces/depth-anything/depth-anything-3 提供了在线体验平台,可以直接测试模型的效果
这些资源为研究者和开发者提供了全面的支持,无论是学术研究还是实际应用,都能从中获得帮助。通过这些资源,DA3的技术和应用将得到更广泛的传播和应用。
总结与展望
Depth Anything 3作为字节跳动Seed团队推出的视觉空间重建模型,通过创新的架构设计和表征方法,实现了从任意视角视觉输入中高效恢复三维空间几何结构的能力。这一模型不仅在技术上取得了显著突破,还在实际应用中展现出巨大潜力。
与传统的三维重建方法相比,DA3具有更高的精度、效率和灵活性。它能够处理从单目到多视图的各种输入场景,生成高精度的三维重建结果,同时保持快速的推理速度。这一特性使得DA3在自动驾驶、机器人导航、虚拟现实等领域具有广泛的应用前景。
未来,随着深度学习和计算机视觉技术的不断发展,DA3有望在更多领域发挥作用。例如,在智慧城市中,它可以用于城市的三维建模和管理;在医疗领域,它可以用于手术导航和医学影像分析;在农业领域,它可以用于作物监测和精准农业等。
此外,DA3的技术原理也可以为其他视觉任务提供借鉴,如目标检测、场景理解等。通过深度-射线表征法和跨视图自注意力机制,我们可以期待更多创新的视觉模型出现,推动计算机视觉技术的进一步发展。
总之,Depth Anything 3不仅是一个创新的技术模型,更是三维视觉重建领域的重要里程碑。它为相关应用提供了新的技术解决方案,也为未来研究指明了方向。我们有理由相信,随着技术的不断进步,DA3将在更多领域发挥重要作用,推动人工智能技术的创新和应用。








