
人工智能领域正在经历一场前所未有的变革,而OpenAI最新推出的群聊功能,正是这场变革中的重要里程碑。这一看似简单的社交功能,实则蕴含着OpenAI对未来AI协作模式的深刻思考与战略布局。本文将深入剖析这一功能背后的技术逻辑、商业考量以及它可能带来的行业影响。
有「眼力见」的AI:重新定义人机交互
OpenAI的群聊功能表面上是一个社交工具,但其核心创新在于重新定义了AI在群体环境中的角色定位。与传统的群聊机器人不同,ChatGPT不再被动等待指令,而是具备了主动判断何时介入对话的能力。
这种「眼力见」的表现形式令人印象深刻。在测试场景中,当群组成员讨论周末计划和食堂吐槽等日常话题时,AI全程保持沉默;而当有人提出「最近有什么好看的科幻片」这类需要专业建议的问题时,AI会主动介入并提供推荐。这种基于上下文判断的介入时机,标志着AI交互模式的重要突破。
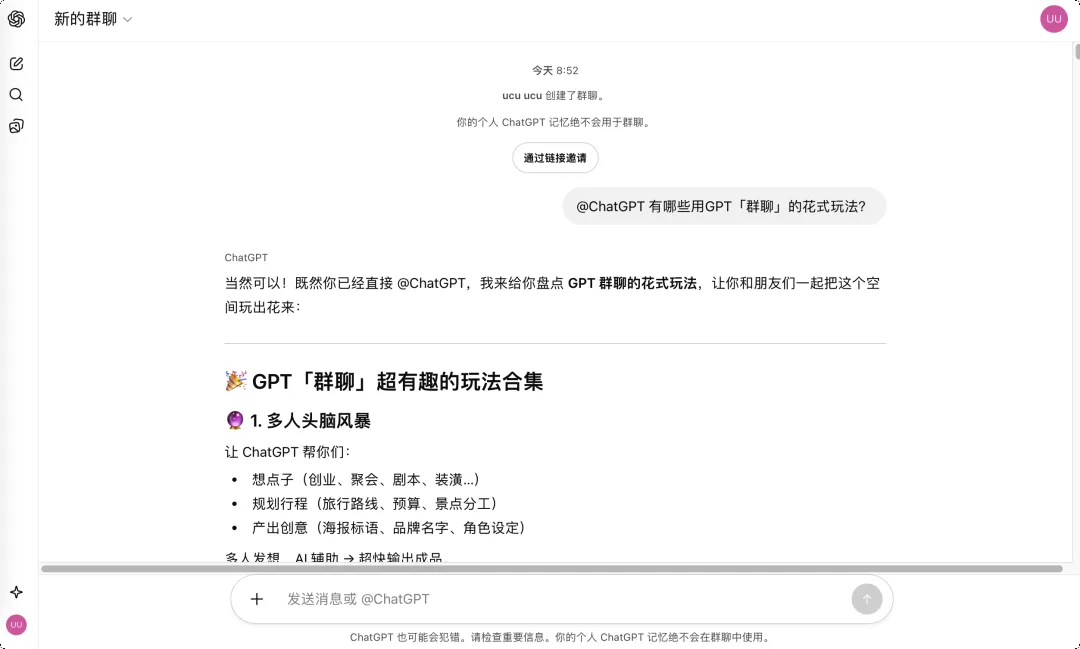
ChatGPT的群聊功能展示了AI在群体环境中的主动判断能力
场景感知能力的实现机制
ChatGPT在群聊中的表现依赖于其复杂的场景感知算法。这一系统通过分析对话内容、参与者互动模式、话题相关性等多维信息,动态判断介入的必要性和时机。虽然目前这一系统仍不完美,偶尔会在不恰当的时刻发言,但其基本框架已经展现出巨大潜力。
多模态支持的全面整合
群聊功能还整合了丰富的多模态能力:
- 联网搜索:实时获取最新信息,为讨论提供数据支持和事实核查
- 图像生成:根据对话需求直接生成可视化内容
- 文档处理:对成员上传的文档进行摘要、分析、翻译或提取关键信息

群聊中的多模态功能支持文档处理和信息检索
个性化建模能力
基于群聊的上下文,ChatGPT能够对每个参与者进行建模,理解其对话风格和需求特点。这种个性化能力使得AI能够提供更加精准和符合用户习惯的交互体验,为未来的个性化协作奠定基础。
从个人助理到协作平台:OpenAI的战略转型
OpenAI推出群聊功能的真实意图,远比表面看起来更为深远。这一举措标志着OpenAI从单纯的AI模型提供商向综合协作平台提供商的战略转型。
商业化逻辑的根本转变
OpenAI逐渐认识到,仅通过API销售难以构建持久的竞争优势。客户随时可能切换到其他供应商,除非他们能在平台上沉淀关系和数据。群聊功能正是按照这一思路设计的,它将ChatGPT从个人工具转变为可协作的平台。

群聊功能将ChatGPT转变为团队协作的核心平台
网络效应的战略布局
通过群聊功能,OpenAI正在构建强大的网络效应。当用户因为项目、客户关系而依赖ChatGPT时,他们离开平台的成本将大幅提高。这种网络效应将成为OpenAI对抗竞争者的护城河,类似于微信在社交领域的垄断地位。
社交能力的测试场
群聊功能也是OpenAI测试ChatGPT社交能力的重要平台。在多人对话环境中,AI需要理解复杂上下文、揣摩不同人意图、判断何时该开玩笑、何时该严肃。这些能力对于AI融入人类日常协作至关重要。
有趣的是,如果未来群聊增加小窗私聊功能,AI甚至可以在群里与用户进行更多互动,扮演游戏主持人或角色扮演游戏中的地下城主(DM),与用户一起玩狼人杀、剧本杀等社交游戏。这将进一步丰富AI在社交场景中的应用可能性。
多Agent协作的未来图景
从更长远的角度看,OpenAI的群聊功能很可能是在为多Agent协作系统做技术验证和用户教育。
单Agent到多Agent的演进
想象一下这样的未来场景:当你在项目群里说「咱们做个读书笔记App」时,群里的多个AI角色会自动分工协作:GPT产品经理开始询问需求、撰写产品需求文档(PRD),GPT工程师同步列出技术方案,GPT设计师绘制界面原型,GPT测试准备测试用例清单。它们互相讨论、互相挑刺,而人类只需要在关键节点做出决策。

群聊功能为未来多Agent协作系统奠定了基础
技术验证的关键步骤
单AI在多人场景中的自然协作,是多Agent系统的基础。OpenAI通过群聊功能,正在验证AI在复杂社交环境中的适应能力和协作效率。这一阶段的成功,将为未来多Agent系统的实现铺平道路。
协作范式的重新定义
如果说微信定义了移动时代的沟通方式,那么OpenAI正在定义AI时代人与机器的协作范式。当大部分人还在用AI简单地总结会议记录时,OpenAI已经让AI坐进了人类的会议室,成为团队协作的核心成员。
行业影响与未来展望
OpenAI的群聊功能不仅仅是一个产品更新,更可能是一个时代的转折点。它将对多个领域产生深远影响:
对企业协作软件的冲击
传统企业协作软件如Slack、Microsoft Teams等将面临新的竞争压力。当AI能够理解团队上下文并主动提供支持时,协作工具的价值主张将发生根本性变化。未来的协作平台可能不再是简单的沟通工具,而是智能化的决策支持系统。
对AI应用开发的影响
群聊功能展示了AI在群体环境中的巨大潜力,这将激励更多开发者探索AI在协作场景中的应用。从项目管理到创意设计,从客户服务到教育培训,AI协作的应用场景将不断拓展。
对人机关系的重新思考
随着AI在协作中扮演越来越重要的角色,我们需要重新思考人与机器的关系。AI是工具还是伙伴?是助手还是团队成员?这些问题的答案将影响我们设计AI系统的方向和方式。
结语:协作AI时代的开启
OpenAI的群聊功能标志着协作AI时代的正式开启。这一创新不仅改变了AI与人类的交互方式,更重新定义了团队协作的可能性。从个人助理到协作平台,从单Agent到多Agent系统,OpenAI正在构建一个全新的AI协作生态。
当AI能够理解团队动态、主动提供支持、甚至自主协作完成任务时,人类的生产力和创造力将得到前所未有的释放。这不仅是技术的进步,更是工作方式和思维方式的革命。群聊功能,可能只是这场革命的开始,未来还有更多可能性等待我们去探索和实现。








