
在人工智能领域,具身智能正逐渐成为研究的热点。近日,上海AI Lab推出了GRUtopia 2.0(桃源2.0),这是一个通用具身智能仿真平台,为该领域的研究和开发带来了新的可能性。该平台在GRUtopia 1.0的基础上进行了全面升级,具备通用模块化框架、场景资产自动化生成和高效数据采集系统三大核心创新,旨在降低开发成本,提高研究效率,推动具身智能从虚拟走向现实。
GRUtopia 2.0的通用模块化仿真框架支持导航、操作、运动控制等多种具身任务。用户可以通过简单的“三行代码”定义复杂任务,无需在多个平台之间切换,极大地简化了开发流程。这种模块化的设计思想,使得开发者能够更加灵活地组合和定制不同的功能模块,以满足不同的研究需求。此外,平台集成了百万级标准化物体资产,结合自动化生成和随机化工具,能实现复杂场景的“一键生成”。这不仅大大降低了场景构建的成本,也为机器人提供了更加多样化的训练环境。
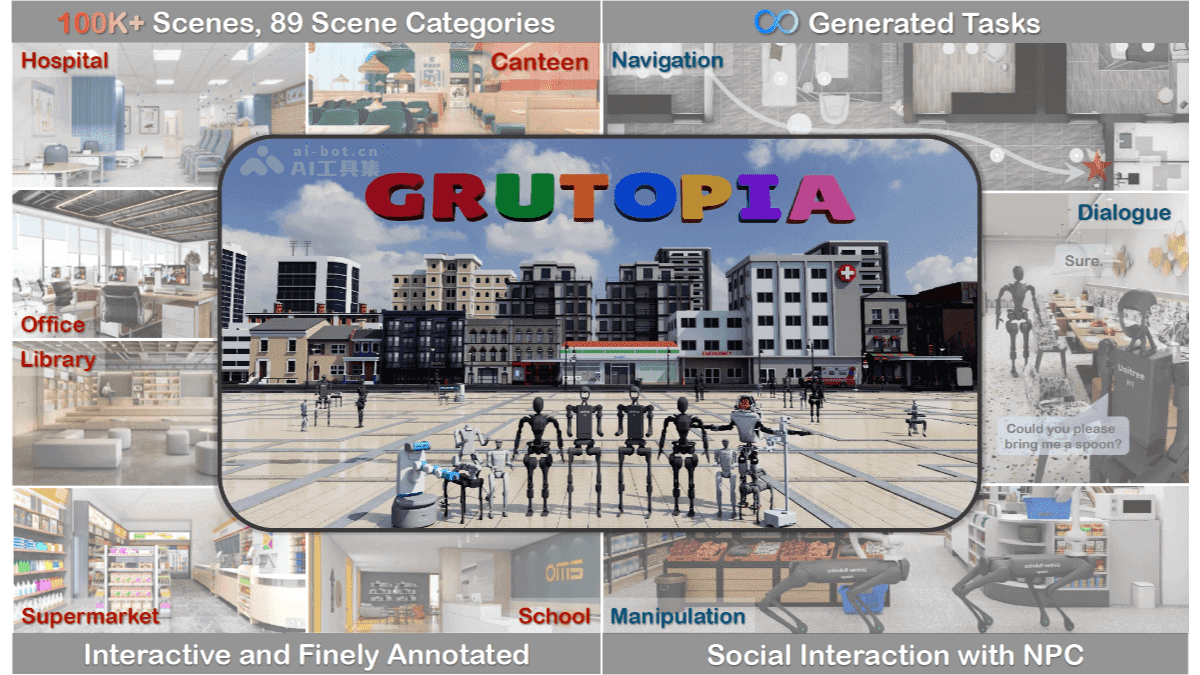
数据采集是具身智能研究中至关重要的一环。GRUtopia 2.0 提供了面向操作任务的多种低门槛遥操作工具,以及面向导航任务的批量化数据采集工具。与传统方式相比,遥操作效率提升5倍,导航任务数据采集效率最高提升20倍。这种高效的数据采集系统,可以帮助研究人员快速获取大量高质量的数据,从而加速算法的训练和优化。同时,平台还包含大规模交互式3D场景数据集(GRScenes),包含10万个高度交互和精细标注的场景,可自由组合成城市规模的环境,涵盖了89种不同的场景类别,弥补了服务型环境的空白。
为了更好地模拟真实世界的社交互动,GRUtopia 2.0 引入了由大语言模型(LLM)驱动的NPC系统(GRResidents)。该系统负责社交互动、任务生成和任务分配,为具身AI应用提供了新的维度。通过与NPC的互动,机器人可以学习如何在复杂的社交环境中完成任务,从而提高其在真实世界中的适应能力。此外,平台还提出了GRBench,支持多种机器人,特别是以腿式机器人为主要智能体,评估执行物体导航、社交导航和移动操作等中等难度任务的能力。
GRUtopia 2.0 通过仿真平台展示了如何用仿真来缓解高质量数据的稀缺性,推动机器人技术从虚拟到现实的扩展和应用。平台支持多种类型的机器人,包括人形机器人和腿式机器人,能满足从底层控制到高层决策的多层级研究需求。这种“仿真到现实”(Sim2Real)的范式,为具身智能的研究提供了一种新的思路和方法。通过在仿真环境中进行大量的实验和训练,可以将学习到的知识和技能迁移到真实机器人上,从而降低了实际部署的成本和风险。
GRUtopia 2.0 的应用场景非常广泛。在机器人训练与开发方面,开发者可以通过简单的“三行代码”定义任务,无需在多个平台之间切换。在复杂场景构建方面,平台集成了百万级标准化物体资产,结合场景自动化生成和随机化工具,能实现复杂场景的“一键生成”。这些场景涵盖了家庭、餐厅、办公室、公共场所等多种环境,为机器人提供了多样化的训练场景。此外,GRUtopia 2.0 引入的由大语言模型(LLM)驱动的NPC系统,能模拟社交互动、任务生成和任务分配,为机器人提供更多的社交互动机会。
在数据采集与优化方面,GRUtopia 2.0 提供了高效的数据采集系统,支持面向操作任务的多种低门槛遥操作工具和面向导航任务的批量化数据采集工具。这些工具可以帮助研究人员快速获取大量高质量的数据,从而加速算法的训练和优化。同时,平台还提供了丰富的API和工具,方便研究人员进行算法的开发和调试。
GRUtopia 2.0的推出,无疑为具身智能领域的研究和发展注入了新的活力。它不仅提供了一个强大的仿真平台,还提供了一系列高效的数据采集和评估工具。相信在不久的将来,GRUtopia 2.0 将会在具身智能领域发挥越来越重要的作用,推动机器人技术从虚拟走向现实。
为了更好地了解和使用GRUtopia 2.0,研究人员和开发者可以访问以下项目地址:
- Github仓库:https://github.com/OpenRobotLab/GRUtopia
- arXiv技术论文:https://arxiv.org/pdf/2407.10943
通过这些资源,可以更深入地了解GRUtopia 2.0 的技术细节和应用方法,从而更好地利用该平台进行研究和开发。








