
TesserAct:AI驱动的4D具身世界模型,预测未来动态场景
在人工智能领域,创造能够理解并预测物理世界动态变化的智能体是一项核心挑战。近期,一种名为TesserAct的创新型4D具身世界模型崭露头角,它通过学习RGB-DN(RGB、深度和法线)视频数据,实现了对3D场景随时间演变的预测,尤其是在具身代理执行动作时。TesserAct不仅超越了传统的2D模型,更在时空一致性方面取得了显著突破,为新视角合成和策略学习带来了革命性的提升。
TesserAct的核心功能详解
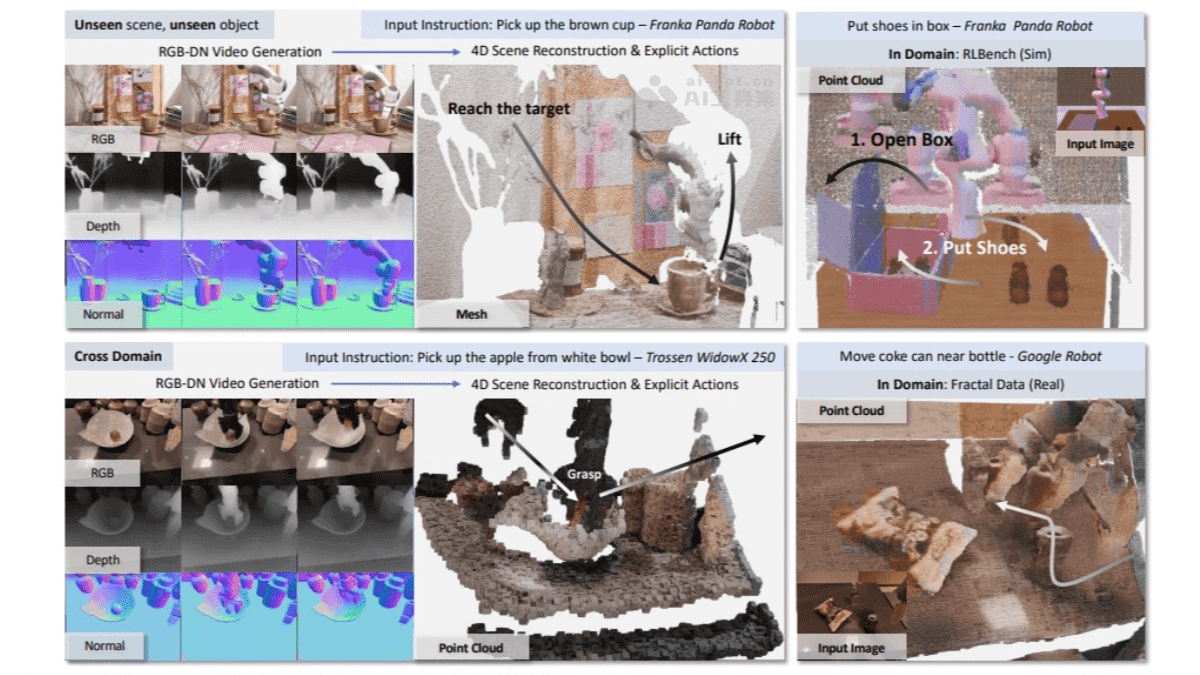
TesserAct的功能集合十分强大,其核心在于能够生成包含RGB(彩色图像)、深度图和法线图的视频流,这些信息共同构建了一个连贯的4D场景。这种场景理解方式使AI系统能够更全面地把握物体的形状、位置和运动,从而做出更准确的预测和决策。
- 4D场景生成:TesserAct生成的视频流不仅仅是静态图像的堆叠,而是包含了丰富的时空信息。RGB数据提供了色彩和纹理,深度图揭示了物体与观察者之间的距离,而法线图则描述了物体的表面朝向。三者结合,AI系统可以构建出一个动态的、立体的世界模型。
例如,在自动驾驶领域,TesserAct可以帮助车辆理解周围环境的动态变化,预测行人、车辆和其他障碍物的运动轨迹,从而做出更安全的驾驶决策。在机器人领域,TesserAct可以使机器人更好地理解和操作物体,完成复杂的装配和操作任务。
新视角合成:TesserAct模型支持从不同视角生成场景的图像,这对于机器人在复杂环境中导航和操作至关重要。通过新视角合成,机器人可以在没有实际观测到的情况下,推断出场景的其他部分,从而更好地规划路径和执行任务。
例如,一个在仓库中工作的机器人,可以使用TesserAct来合成货架后方的场景图像,从而找到目标商品并规划最佳的取货路径。
时空一致性优化:TesserAct通过引入时空连续性约束,确保生成的4D场景在时间和空间上保持高度一致,更接近真实世界的物理规律。这意味着模型不仅要预测每一帧的图像,还要确保这些图像在时间和空间上是连贯的,避免出现突兀的变化或不合理的运动。
例如,在模拟一个物体 falling 的场景时,TesserAct会确保物体在每一帧中的位置和速度都符合物理规律,避免出现物体突然跳跃或消失的情况。
机器人操作支持:基于TesserAct的机器人在各种操作任务中表现出色,特别是在需要精确空间理解的任务上,成功率远高于仅依赖2D图像的方法。这是因为TesserAct提供了更全面的场景信息,使机器人能够更准确地感知和理解环境。
例如,在需要机器人抓取一个形状不规则的物体时,TesserAct可以提供物体的精确3D模型,使机器人能够选择最佳的抓取点和抓取方式,从而提高抓取成功率。
跨平台泛化能力:TesserAct在不同平台和环境中的表现稳定,能适应多种复杂的场景。这意味着模型不仅仅在特定的数据集上表现良好,而且可以在真实世界的各种场景中应用。
例如,TesserAct可以在不同的光照条件、不同的物体材质和不同的背景下工作,从而适应各种复杂的工业和商业环境。
TesserAct的技术原理探究
TesserAct的技术原理是其强大功能的基础。它通过数据集扩展、视频生成模型微调、场景转换算法和时空一致性优化等关键技术,实现了对4D场景的精确预测和生成。
数据集扩展:TesserAct首先扩展现有的机器人操作视频数据集,通过添加深度和法线信息来丰富数据内容。这是通过基于现成的模型来获取深度和法线数据实现的,为训练提供了更丰富的多模态信息。
例如,研究人员可以使用现有的深度估计模型和表面法线估计模型,从RGB图像中提取深度和法线信息,然后将这些信息添加到原始的视频数据集中。
视频生成模型微调:在扩展后的数据集上,TesserAct微调了一个视频生成模型,能联合预测每一帧的RGB、深度和法线信息。这种多模态预测能力使模型能更全面地理解场景的形状、配置和时间变化。
例如,研究人员可以使用Transformer模型或GAN模型来构建视频生成模型,然后使用扩展后的数据集对模型进行微调,使其能够同时预测RGB、深度和法线信息。
场景转换算法:TesserAct提出了一种算法,能将生成的RGB、深度和法线视频直接转换为高质量的4D场景。这种算法确保了从具身场景中预测的4D场景在时间和空间上的连贯性,支持新视角合成和策略学习。
例如,研究人员可以使用点云重建算法或网格重建算法,将RGB、深度和法线信息转换为3D点云或3D网格,然后使用时间序列分析方法对这些3D模型进行处理,从而生成连贯的4D场景。
时空一致性优化:TesserAct通过引入时空连续性约束,确保生成的4D场景在时间和空间上保持高度一致。这使得模型能更真实地反映物理世界的动态变化,为具身智能体提供了更准确的环境理解。
例如,研究人员可以使用卡尔曼滤波或粒子滤波等方法,对生成的4D场景进行平滑处理,从而消除噪声和不一致性,提高场景的真实感和可靠性。
逆动力学模型学习:TesserAct能生成高质量的4D场景,从而学习具身智能体的逆动力学模型。这使得智能体可以更准确地预测其动作对环境的影响,并在复杂任务中表现更优。
例如,研究人员可以使用强化学习算法,让智能体在生成的4D场景中进行训练,从而学习如何根据当前的状态和目标,选择最佳的动作,以达到预期的结果。
TesserAct的应用场景展望
TesserAct的应用前景广阔,它可以在机器人操作、虚拟环境交互、具身智能研究和工业自动化等领域发挥重要作用。
机器人操作任务:TesserAct通过生成高质量的4D场景,帮助机器人更好地理解和预测环境的动态变化。例如,在物体抓取、分类和放置任务中,TesserAct能提供精确的空间信息,显著提高机器人操作的成功率。
例如,在智能工厂中,机器人可以使用TesserAct来识别和抓取不同形状和大小的零件,然后将它们放置到正确的位置,从而实现自动化生产。
虚拟环境交互:TesserAct支持新视角合成和时空一致性的4D场景生成,为虚拟现实(VR)或增强现实(AR)应用提供了强大的支持。通过TesserAct,用户可以在虚拟环境中获得更逼真的视觉体验,并与虚拟环境进行更自然的交互。
例如,在VR游戏中,TesserAct可以生成逼真的游戏场景,让玩家感觉身临其境。在AR应用中,TesserAct可以将虚拟物体叠加到真实场景中,让用户与虚拟物体进行交互。
具身智能研究:TesserAct为具身智能研究提供了强大的工具,帮助研究人员更好地理解智能体如何通过感知和动作与环境互动。通过TesserAct,研究人员可以模拟各种复杂的环境和任务,从而研究智能体的学习、决策和控制策略。
例如,研究人员可以使用TesserAct来模拟一个家庭环境,然后让智能体在其中学习如何完成各种家务任务,如清洁、整理和烹饪。
工业自动化:在工业自动化场景中,TesserAct可以帮助机器人更好地执行任务,例如在动态环境中进行物体识别和操作。其时空连续性优化能力使其能够适应复杂的工作环境。
例如,在物流仓库中,机器人可以使用TesserAct来识别和搬运不同类型的包裹,从而提高物流效率。
结语:TesserAct开启具身智能新篇章
TesserAct作为一种创新的4D具身世界模型,为具身智能领域带来了新的突破。它通过学习RGB-DN视频数据,实现了对3D场景随时间演变的预测,并在时空一致性方面取得了显著进展。随着TesserAct的不断发展和完善,我们有理由相信,它将在机器人操作、虚拟环境交互、具身智能研究和工业自动化等领域发挥越来越重要的作用,开启具身智能的新篇章。
TesserAct的出现,不仅是技术上的一次飞跃,更是对人工智能发展方向的一次深刻反思。它提醒我们,真正的智能不仅仅是计算能力的提升,更是对物理世界的深刻理解和灵活适应。只有当我们能够创造出真正理解世界的智能体,才能实现人工智能的最终目标。








