
在人工智能领域,具身智能正逐渐崭露头角,它不仅仅是让机器拥有视觉和听觉,更重要的是让它们能够理解和与周围环境互动。TesserAct,一个由马萨诸塞大学阿默斯特分校的研究团队开发的AI模型,正是朝着这个方向迈出的重要一步。它是一个4D具身世界模型,能够预测3D场景随时间的演变,并响应具身代理的动作。这种模型的核心在于其时空一致性,能够支持新视角的合成,并显著提升策略学习的性能。本文将深入探讨TesserAct的技术原理、功能特性及其潜在的应用场景,希望能为读者揭示这一前沿技术的魅力。
TesserAct 的核心功能在于其能够生成包含RGB(彩色图像)、深度图和法线图的视频流,这些信息共同构成了一个连贯的4D场景,使得AI系统能够更全面地理解物体的形状、位置和运动。不仅如此,该模型还支持从不同视角生成场景图像,这对于机器人在复杂环境中进行导航和操作具有重要意义。通过引入时空连续性约束,TesserAct确保生成的4D场景在时间和空间上保持高度一致,更接近真实世界的物理规律。这使得基于TesserAct的机器人在各种操作任务中表现出色,特别是在需要精确空间理解的任务上,成功率远高于仅依赖2D图像的方法。此外,TesserAct还具备跨平台泛化能力,能够在不同平台和环境中稳定运行,适应多种复杂的场景。
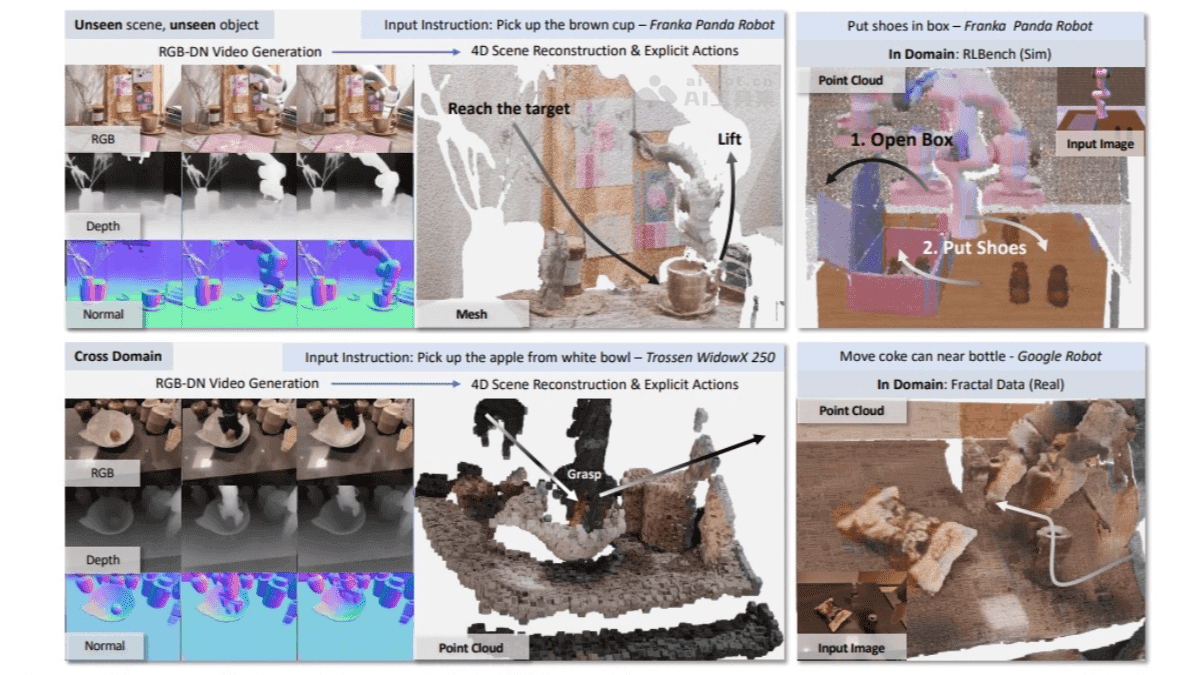
TesserAct的技术原理主要体现在以下几个方面。首先,它扩展了现有的机器人操作视频数据集,通过添加深度和法线信息来丰富数据内容。这一步骤至关重要,因为它为模型的训练提供了更丰富的多模态信息。其次,TesserAct微调了一个视频生成模型,使其能够联合预测每一帧的RGB、深度和法线信息。这种多模态预测能力使得模型能够更全面地理解场景的形状、配置和时间变化。此外,TesserAct还提出了一种场景转换算法,能够将生成的RGB、深度和法线视频直接转换为高质量的4D场景。这确保了从具身场景中预测的4D场景在时间和空间上的连贯性,从而支持新视角的合成和策略学习。通过引入时空连续性约束,TesserAct确保生成的4D场景在时间和空间上保持高度一致,使其能够更真实地反映物理世界的动态变化,为具身智能体提供更准确的环境理解。最后,TesserAct能够生成高质量的4D场景,从而学习具身智能体的逆动力学模型,使得智能体能够更准确地预测其动作对环境的影响,在复杂任务中表现更优。
项目地址:
- 项目官网:https://tesseractworld.github.io/
- Github仓库:https://github.com/UMass-Embodied-AGI/TesserAct
- HuggingFace模型库:https://huggingface.co/anyeZHY/tesseract
- arXiv技术论文:https://arxiv.org/pdf/2504.20995
TesserAct的应用场景十分广泛。首先,在机器人操作任务中,TesserAct通过生成高质量的4D场景,帮助机器人更好地理解和预测环境的动态变化。例如,在物体抓取、分类和放置任务中,TesserAct能够提供精确的空间信息,显著提高机器人操作的成功率。其次,在虚拟环境交互中,TesserAct支持新视角合成和时空一致性的4D场景生成,这使得它在虚拟现实(VR)或增强现实(AR)场景中能够为用户提供更逼真的视觉体验。此外,TesserAct还为具身智能研究提供了强大的工具,帮助研究人员更好地理解智能体如何通过感知和动作与环境互动。最后,在工业自动化场景中,TesserAct可以帮助机器人更好地执行任务,例如在动态环境中进行物体识别和操作。其时空连续性优化能力能够适应复杂的工作环境。
TesserAct:4D具身世界模型的崛起
TesserAct的出现,无疑为具身智能领域注入了新的活力。它不仅在技术上有所突破,更在应用场景上展现出巨大的潜力。那么,TesserAct究竟是如何实现的?它又将如何改变我们与AI的互动方式呢?
1. 技术解析:TesserAct如何构建4D世界?
TesserAct的核心在于其对4D场景的理解和预测能力。为了实现这一目标,TesserAct采用了以下关键技术:
多模态数据融合:TesserAct不仅仅依赖于传统的RGB图像,还融入了深度信息和法线信息。这些额外的信息为模型提供了更丰富的场景理解能力,使其能够更准确地捕捉物体的形状、位置和姿态。
视频生成模型微调:TesserAct在现有的视频生成模型的基础上进行了微调,使其能够同时预测RGB、深度和法线信息。这种联合预测的方式不仅提高了预测的准确性,还保证了不同模态数据之间的一致性。
时空一致性约束:为了保证生成场景的真实感,TesserAct引入了时空一致性约束。这意味着模型不仅要保证每一帧图像的真实性,还要保证相邻帧之间的连贯性。这种约束使得生成的4D场景更加平滑、自然。
逆动力学模型学习:TesserAct还能够学习具身智能体的逆动力学模型。这意味着模型可以预测智能体的动作对环境的影响,从而帮助智能体更好地规划自己的行为。
2. 功能特性:TesserAct的独特优势
与其他AI模型相比,TesserAct具有以下独特优势:
4D场景生成能力:TesserAct能够生成包含RGB、深度图和法线图的完整4D场景,这使得AI系统能够更全面地理解环境。
新视角合成:TesserAct支持从不同视角生成场景图像,这对于机器人在复杂环境中进行导航和操作至关重要。
时空一致性优化:TesserAct通过引入时空连续性约束,确保生成的4D场景在时间和空间上保持高度一致。
跨平台泛化能力:TesserAct在不同平台和环境中表现稳定,能够适应多种复杂的场景。
3. 应用场景:TesserAct的无限可能
TesserAct的应用场景十分广泛,以下是一些典型的应用场景:
机器人操作:TesserAct可以帮助机器人更好地理解和预测环境的动态变化,从而提高机器人操作的成功率。例如,在物体抓取、分类和放置任务中,TesserAct可以提供精确的空间信息,帮助机器人更准确地完成任务。
虚拟环境交互:TesserAct可以为用户提供更逼真的虚拟现实(VR)或增强现实(AR)体验。通过生成时空一致的4D场景,TesserAct可以增强用户的沉浸感,使其感觉仿佛置身于真实的环境中。
具身智能研究:TesserAct为具身智能研究提供了强大的工具,帮助研究人员更好地理解智能体如何通过感知和动作与环境互动。通过模拟不同的环境和场景,研究人员可以更好地了解智能体的行为模式,从而改进智能体的设计。
工业自动化:TesserAct可以帮助机器人更好地执行工业自动化任务。例如,在动态环境中进行物体识别和操作时,TesserAct可以提供精确的空间信息,帮助机器人更准确地完成任务。
4. 案例分析:TesserAct在机器人操作中的应用
为了更具体地了解TesserAct的应用效果,我们来看一个案例:
假设一个机器人需要在一个复杂的环境中抓取一个物体。这个环境中有多个物体,而且这些物体的位置可能会发生变化。在这种情况下,传统的机器人操作方法可能会遇到困难,因为它们无法准确地理解环境的动态变化。
但是,如果机器人使用了TesserAct,情况就会大不相同。TesserAct可以生成包含RGB、深度图和法线图的完整4D场景,这使得机器人能够更全面地理解环境。此外,TesserAct还支持新视角合成,这意味着机器人可以从不同的角度观察环境,从而更准确地确定物体的位置。最后,TesserAct还能够学习具身智能体的逆动力学模型,这意味着机器人可以预测自己的动作对环境的影响,从而更好地规划自己的行为。
通过这些技术的结合,TesserAct可以帮助机器人更准确地抓取物体,即使在复杂的环境中也能保持较高的成功率。
5. 挑战与展望:TesserAct的未来发展
虽然TesserAct在具身智能领域取得了显著的进展,但它仍然面临着一些挑战:
计算复杂度:TesserAct需要处理大量的多模态数据,这使得其计算复杂度较高。如何降低计算复杂度,提高模型的运行效率,是一个重要的研究方向。
数据依赖性:TesserAct的性能受到训练数据的影响。如何获取更多、更丰富的训练数据,是一个重要的挑战。
泛化能力:虽然TesserAct在多个平台上表现良好,但其泛化能力仍然有待提高。如何提高模型的泛化能力,使其能够适应更广泛的应用场景,是一个重要的研究方向。
展望未来,TesserAct有望在以下几个方面取得更大的突破:
更高效的模型:通过优化模型结构和算法,可以降低TesserAct的计算复杂度,提高其运行效率。
更强大的泛化能力:通过引入更先进的训练方法和数据增强技术,可以提高TesserAct的泛化能力,使其能够适应更广泛的应用场景。
更智能的交互:通过结合自然语言处理和语音识别技术,可以使TesserAct能够与用户进行更智能的交互,从而提供更个性化的服务。
TesserAct作为一种创新的4D具身世界模型,在具身智能领域具有重要的意义。它不仅在技术上有所突破,更在应用场景上展现出巨大的潜力。随着技术的不断发展,我们有理由相信,TesserAct将在未来发挥更大的作用,为人类带来更智能、更便捷的生活体验。








