
DreamGen:英伟达机器人学习技术的革新之路
在人工智能领域,英伟达(NVIDIA)不断推陈出新,其最新发布的DreamGen技术,无疑为机器人学习开辟了一条崭新的道路。这项创新技术,通过AI视频世界模型生成合成数据,使得机器人在虚拟的“梦境”中学习新技能成为可能。这意味着,机器人不再需要依赖大量的真实世界数据,也能在新环境中实现行为和环境的泛化。
DreamGen的核心功能与优势
DreamGen的核心在于其强大的功能和显著的优势。以下将详细探讨其几个关键方面:
- 行为泛化:传统的机器人学习方法往往需要为每一种新的行为收集大量的真实世界数据,这无疑是一个耗时且成本高昂的过程。而DreamGen的出现,使得机器人能够通过学习和执行新的行为,无需依赖大量的真实数据。这种行为泛化的能力,极大地提高了机器人学习的效率。
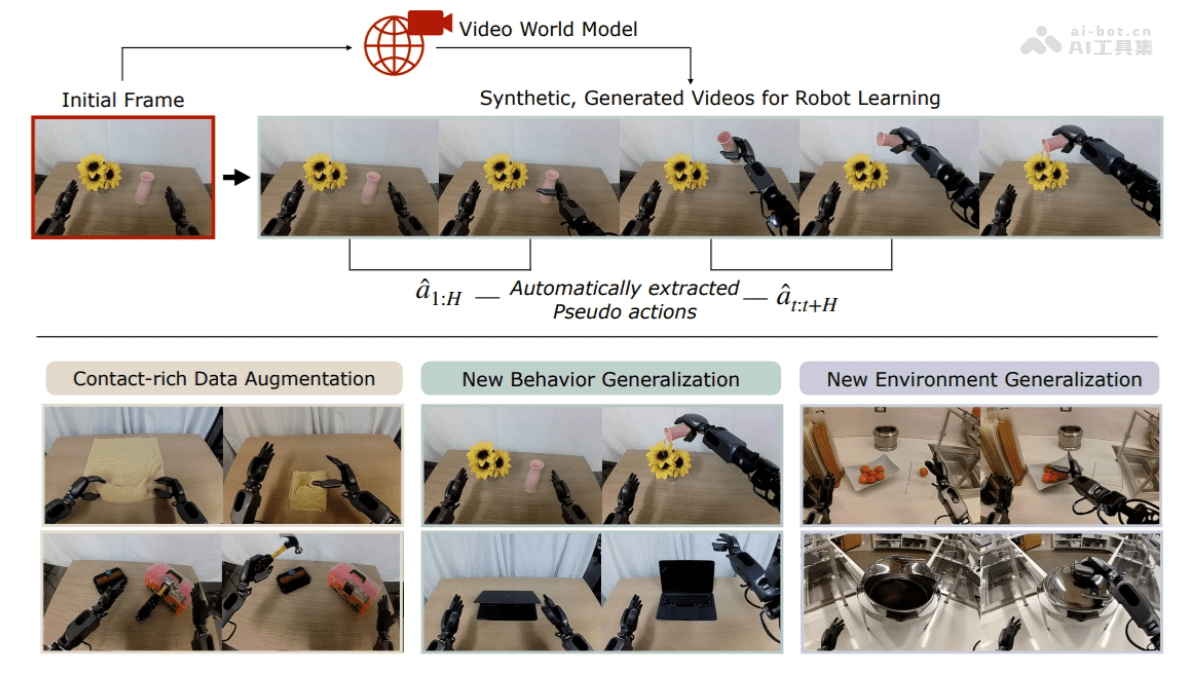
环境泛化:除了行为泛化,DreamGen还具备强大的环境泛化能力。这意味着,机器人在单一环境中收集的数据,也能在多种新的环境中成功执行任务。这种能力对于机器人在复杂和多变的环境中工作至关重要。
数据增强:DreamGen能够生成大规模的合成训练数据,这对于提升机器人在复杂任务中的成功率至关重要。通过这种数据增强,机器人可以更好地适应各种挑战,提高其在实际应用中的可靠性。
多机器人系统支持:DreamGen具有广泛的适用性,它支持多种机器人系统,例如Franka、SO-100等,以及不同的策略架构,如Diffusion Policy、GR00T N1等。这种多机器人系统的支持,使得DreamGen能够应用于各种不同的机器人应用场景。
DreamGen的技术原理深度剖析
DreamGen的技术原理是其强大功能的基础。以下将深入分析其四个关键步骤:
微调视频世界模型:DreamGen首先使用目标机器人的遥操作轨迹数据,对视频世界模型(如Sora、Veo等)进行微调。这一步骤旨在捕捉机器人的运动学和动力学特征。通过低秩适应(LoRA)技术,可以减少模型对原始数据的遗忘,使其更好地适应新的机器人特征。
虚拟数据生成:在给定初始帧和语言指令的情况下,视频世界模型能够生成大量的机器人视频序列,这些序列描述了预期的行为。这些视频不仅包含已知的行为,还包括新环境中的新行为。为了确保生成的数据质量,DreamGen会过滤掉不符合指令的“噩梦”视频。
虚拟动作提取:接下来,DreamGen使用潜在动作模型(LAPA)或逆动力学模型(IDM)来解析生成的视频序列,提取伪动作序列,形成神经轨迹。这些伪动作序列将被用于训练下游的视觉运动策略。
策略训练:最后,DreamGen使用生成的视频动作序列对(即神经轨迹)来训练下游的视觉运动策略。通过这种方式,机器人在没有真实世界数据支持的情况下,也能够学习新的任务,实现零样本泛化。
DreamGen的应用场景展望
DreamGen的应用前景广阔,以下将探讨其在几个关键领域的应用:
工业生产:在工业生产中,DreamGen可以助力机器人快速掌握装配、焊接等复杂任务,从而提高生产效率和质量。例如,在汽车制造过程中,机器人可以利用DreamGen学习如何精确地安装各种零部件,减少人为误差,提高生产线的自动化水平。
家庭服务:DreamGen可以使机器人适应不同的家庭环境,完成清洁、整理等多样化的家务。例如,家庭服务机器人可以利用DreamGen学习如何避开障碍物,安全地清扫房间,或者如何将物品整理到指定的位置。
医疗护理:在医疗护理领域,DreamGen可以辅助医疗机器人进行精准操作,提高手术、康复等医疗环节的效率和安全性。例如,手术机器人可以利用DreamGen学习如何在狭小的空间内进行精细的操作,减少手术创伤,提高手术成功率。
物流仓储:DreamGen可以帮助机器人高效处理各类物品的分拣、搬运,优化物流流程。例如,在大型仓库中,机器人可以利用DreamGen学习如何快速准确地找到目标商品,并将其搬运到指定的位置,提高物流效率。
农业生产:DreamGen可以支持农业机器人在复杂环境中完成种植、收割等任务,提高农业产出。例如,农业机器人可以利用DreamGen学习如何在不同的地形条件下进行播种和施肥,或者如何识别成熟的农作物并进行采摘。
DreamGen:机器人学习的新范式
DreamGen的出现,标志着机器人学习进入了一个新的时代。它不仅降低了机器人学习的成本,提高了学习效率,还拓展了机器人应用的可能性。随着技术的不断发展,我们可以期待DreamGen在更多领域发挥重要作用,为人类创造更美好的未来。
DreamGen与传统机器人学习方法的对比
| 特性 | DreamGen | 传统机器人学习方法 |
|---|---|---|
| 数据需求 | 仅需少量现实视频数据 | 需要大量的真实世界数据 |
| 泛化能力 | 具有强大的行为和环境泛化能力 | 泛化能力有限,难以适应新环境 |
| 学习效率 | 学习效率高,能够在虚拟环境中快速学习新技能 | 学习效率低,需要大量时间和资源 |
| 适用性 | 适用于多种机器人系统和策略架构 | 适用性有限,通常只能应用于特定的机器人系统和策略架构 |
| 应用场景 | 广泛应用于工业生产、家庭服务、医疗护理、物流仓储、农业生产等领域 | 主要应用于特定场景,难以推广到其他领域 |
| 成本 | 成本较低,减少了数据采集和标注的成本 | 成本较高,需要大量的人力和物力 |
| 零样本泛化 | 支持零样本泛化,能够在没有真实世界数据的情况下学习新任务 | 不支持零样本泛化,需要大量的真实世界数据进行训练 |
| 数据增强 | 能够生成大规模的合成训练数据,提升机器人的成功率 | 数据增强能力有限,难以生成高质量的合成数据 |
| 模型微调 | 基于低秩适应(LoRA)技术,减少模型对原始数据的遗忘 | 模型微调较为困难,容易出现过拟合或欠拟合 |
| 视频世界模型 | 利用视频世界模型生成虚拟数据 | 缺乏有效的视频世界模型 |
| 动作提取 | 利用潜在动作模型(LAPA)或逆动力学模型(IDM)提取伪动作序列 | 动作提取较为困难,需要人工设计特征 |
| 策略训练 | 用生成的视频动作序列对训练下游的视觉运动策略 | 策略训练需要大量的真实世界数据 |
| 应对复杂任务 | 能够应对复杂的任务,提高机器人在实际应用中的可靠性 | 难以应对复杂的任务,容易出现错误或失败 |
| 环境适应性 | 能够适应不同的环境,包括未见过的环境 | 环境适应性差,难以适应新的环境 |
| 智能化程度 | 智能化程度高,能够自主学习和决策 | 智能化程度低,需要人工干预 |
| 安全性 | 能够通过虚拟环境进行安全评估和测试 | 缺乏有效的安全评估和测试手段 |
| 可扩展性 | 具有良好的可扩展性,能够适应新的机器人和任务 | 可扩展性差,难以适应新的机器人和任务 |
| 长期发展潜力 | 具有巨大的长期发展潜力,有望成为未来机器人学习的主流方向 | 长期发展潜力有限,难以满足未来机器人学习的需求 |
结论:DreamGen引领机器人学习的未来
DreamGen作为英伟达推出的一项创新技术,无疑为机器人学习领域带来了革命性的变革。通过AI视频世界模型生成合成数据,DreamGen使得机器人能够在虚拟环境中学习新技能,从而摆脱对大量真实世界数据的依赖。这项技术不仅提高了机器人学习的效率和泛化能力,还为机器人在各个领域的应用开辟了新的可能性。随着技术的不断进步和应用场景的不断拓展,DreamGen有望成为未来机器人学习的主流方向,为人类社会带来更多的便利和效益。








