在人工智能领域,具身智能(Embodied AI)正逐渐成为研究热点。香港大学与上海人工智能实验室联合推出的VLN-R1框架,为这一领域带来了新的突破。该框架能够直接将第一人称视角下的视频流转化为连续的导航动作,为机器人在复杂环境中的自主导航提供了强大的技术支持。
VLN-R1的核心功能
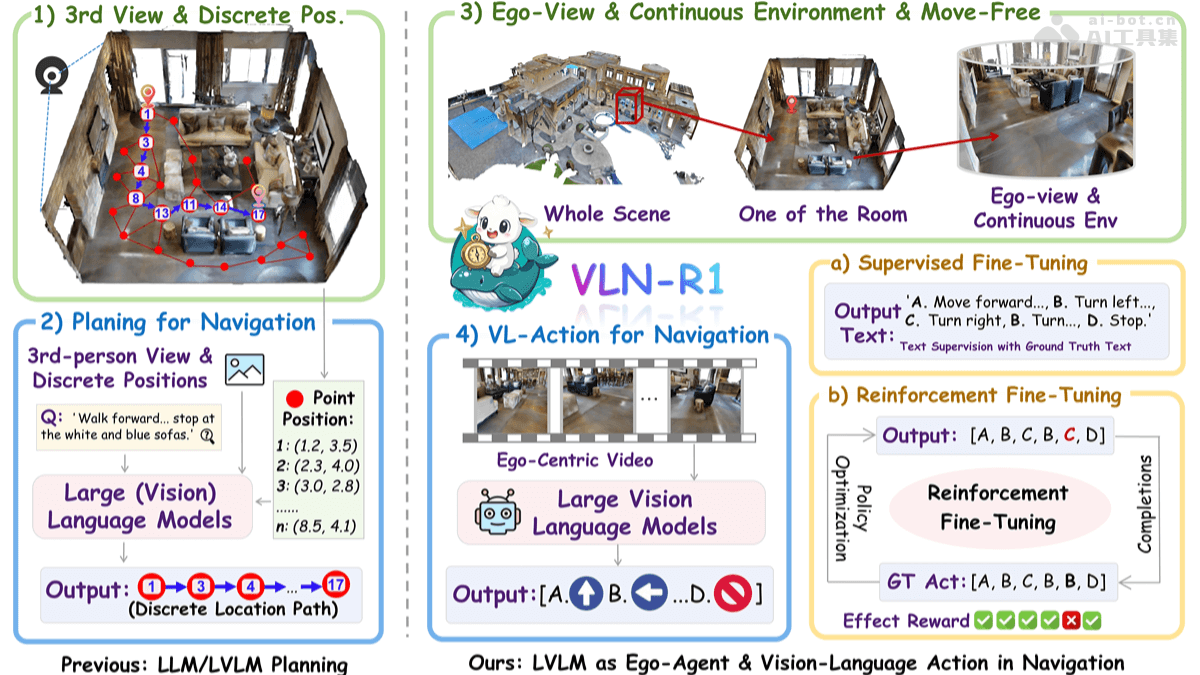
VLN-R1框架的核心在于其能够实现连续环境下的自主导航。与传统的基于预定义节点的导航方式不同,VLN-R1能够处理第一人称视角的视频流,使智能体能够在连续的3D环境中自由移动。这种能力对于机器人在真实世界中执行复杂任务至关重要。该框架能够生成四种基本的动作命令:前进(FORWARD)、左转(TURN-LEFT)、右转(TURN-RIGHT)和停止(STOP),从而实现对导航过程的精确控制。这种精细的控制能力使得智能体能够更加灵活地应对各种复杂的环境。
VLN-R1框架在训练过程中表现出卓越的数据效率。它采用了监督微调(SFT)和强化微调(RFT)相结合的方法,仅需有限的数据即可实现高效的模型训练,从而显著提升导航性能。此外,该框架还具有出色的跨领域适应能力。通过强化微调(RFT),模型能够快速适应新的导航任务和环境,即使只有少量的数据也能表现出色。这种适应能力使得VLN-R1在各种不同的应用场景中都能发挥作用。
VLN-R1还具备强大的任务特定推理能力。通过基于时间衰减奖励(TDR)机制,该框架能够优化多步未来动作的预测,从而增强长期导航性能。这种能力使得智能体能够更好地规划未来的行动,从而在复杂的导航任务中取得更好的表现。
VLN-R1的技术原理
VLN-R1框架的技术原理主要包括数据集构建、长短期记忆采样、监督微调(SFT)、强化微调(RFT)和大型视觉语言模型(LVLM)等几个方面。
为了训练模型,研究人员构建了VLN-Ego数据集。该数据集基于Habitat 3D模拟器生成,包含了第一人称视角的视频流和对应的未来动作预测,为模型训练提供了丰富的数据。Habitat 3D模拟器是一个高性能的仿真平台,能够模拟各种真实的3D环境,为具身智能的研究提供了重要的支持。
在处理视频输入时,VLN-R1框架采用了长短期记忆(LSTM)采样策略。这种策略能够动态平衡历史帧的重要性与实时输入的敏感性,确保模型在导航过程中既考虑短期相关性,又不丢失长期上下文信息。LSTM是一种特殊的循环神经网络,能够有效地处理序列数据,并在自然语言处理和语音识别等领域取得了广泛的应用。
监督微调(SFT)是VLN-R1框架中的一个重要步骤。通过最小化模型预测文本与专家演示文本之间的交叉熵损失,SFT能够使模型的动作序列预测与真实动作对齐,确保模型能够准确理解语言指令并生成相应的动作。交叉熵损失是一种常用的损失函数,用于衡量模型预测结果与真实结果之间的差异。
强化微调(RFT)是VLN-R1框架中的另一个关键步骤。该框架采用了基于组相对策略优化(GRPO)的强化学习方法,并使用时间衰减奖励(TDR)机制来评估和优化多步未来动作的预测,从而增强模型在长期导航任务中的性能。强化学习是一种机器学习方法,通过让智能体在环境中进行交互,并根据获得的奖励来学习最优策略。
VLN-R1框架还采用了大型视觉语言模型(LVLM),例如Qwen2-VL,来处理视觉和语言输入,实现从第一人称视频流到导航动作的直接映射,提升模型的泛化能力和适应性。LVLM是一种强大的模型,能够同时处理视觉和语言信息,并在图像描述、视觉问答等领域取得了显著的成果。
VLN-R1的应用场景
VLN-R1框架具有广泛的应用前景,可以在家庭服务机器人、工业自动化、智能仓储、医疗保健和智能交通等领域发挥重要作用。
在家庭服务机器人领域,VLN-R1可以使机器人根据主人的自然语言指令在家中自由导航,完成打扫卫生、取物等任务,从而提升生活的便利性。例如,主人可以通过语音指令让机器人将客厅的遥控器送到卧室。
在工业自动化领域,VLN-R1可以助力机器人在工厂车间按操作员指令灵活导航,完成物料搬运和设备维护,从而提高生产效率。例如,操作员可以通过指令让机器人将生产线上的半成品运送到下一个工位。
在智能仓储领域,VLN-R1可以使仓库机器人依据指令在货架间精准导航,高效完成货物存储与检索,从而优化仓储管理。例如,管理员可以通过指令让机器人将新入库的货物放置到指定的货架上。
在医疗保健领域,VLN-R1可以支持医院或养老院机器人在医护人员或患者指令下导航,完成送药、送餐等任务,从而减轻医护负担。例如,护士可以通过指令让机器人将药物送到患者的病房。
在智能交通领域,VLN-R1可以帮助自动驾驶车辆在复杂城市环境中按交通信号和指令导航,增强行驶安全性和灵活性。例如,驾驶员可以通过语音指令让车辆按照导航路线行驶。
VLN-R1的优势与挑战
VLN-R1框架的优势在于其能够实现连续环境下的自主导航,具有较高的数据效率和跨领域适应能力,并且能够进行任务特定推理。然而,该框架也面临着一些挑战。例如,如何在更加复杂的环境中实现鲁棒的导航,如何处理光照变化、遮挡等问题,以及如何提高模型的泛化能力等。
VLN-R1的未来发展方向
未来,VLN-R1框架可以朝着以下几个方向发展:
- 提高鲁棒性:研究更加鲁棒的导航算法,以应对复杂环境中的各种挑战。
- 增强泛化能力:通过使用更多的数据和更先进的模型,提高模型的泛化能力,使其能够适应不同的环境和任务。
- 实现多模态融合:将视觉信息与其他模态的信息(例如,语音、文本等)融合起来,以提高导航的准确性和效率。
- 开发新的应用场景:探索VLN-R1在更多领域的应用,例如,灾难救援、军事侦察等。
结语
VLN-R1框架是具身智能领域的一项重要进展,它为机器人在复杂环境中的自主导航提供了强大的技术支持。随着技术的不断发展,我们有理由相信,VLN-R1将在未来发挥更大的作用,为人类社会带来更多的便利。